
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 [54] 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 Наиболее простыми системами обработки информации являются аналоговые системы. Задание скорости производится в виде напряжения постоянного тока, поступающего в систему управления от стабилизированных источников напряжения. Измерение скорости производится с помощью тахогеиераторов (Тг) постоянного или переменного тока. В последнем случае напряжение переменного тока преоазуется, как правило, в напряжение постоянного тока с помощью выпрямителей и фильтров. Из-мерение отклонения скорости от заданных значений производится с помощью сумматоров, выполняемых на операционных усилителях. В системах управления сумматор совмещается с PC. Для формирования процессов пуска или перехода с одной заданной скорости на другую применяются задатчики интенсивности (ЗИ), устройство н работа которых рассмотрены в гл. 2. 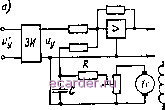  Рис 5-1 Варианты двух аналоговых систем обработки информации о скорости электропривода с Тг постоянного и переменного тока показаны на рис. 5-1, а, б. Фильтры RC и RLC применяются для сглаживания пульсаций напряжений Тг. В Тг постоянного тока наблюдаются оборотные и коллекторные пульсации напряжений, саязан-ные с такими явлениями, как магнитная анизотропия якоря, ком-мутацпонные явления в щеточн о-кол лектор ном узле, неточные сочленения Тг с двигателем и др. Периодические пульсации выходных напряженнй наблюдаются и при использовании асинхронных и синхронных Тг. Наличие довольно большого уровня помех н связанная с этим необходимость фильтрации выходных напряжений являются недостатками Тг постоянного н перемеииого тока. Минимальная погрешность лучших образцов аналоговых систем обработки информации о скорости электроприводов находится на уровне 0,1 %. При необходимости получения больших точностей необходимо использовать цифровые системы обработки ниформащн! с импульсными датчикаьщ скорости. При повороте иа некоторый угол импульсного датчика на его выходе формируется вполне опред&тениое число импульсов, соответствующее углу поворота. Импульсные датчики могут испачьзо-ваться для контроля линейных и угловых пepeteщeиий. При непрерывном движении датчика образуется непрерывная последователь- ность импульсов, мгновенная частота которых пропорциональна мгновенной скорости датчика. В современных системах электропривода используются в основном нндуктосинные и фотоэлектрические импульсные датчики. Они обладают минимальными погрешностями, которые наиболее полно характеризуются спектральными плотностями 5 (со) или корреля-цноннымн функциями R (х). Наблюдаются в таких датчиках н регулярные (систематические) составляющие погрешностей - оборотные, шаговые и др. Уровни погрешностей в импульсных датчиках значительно ниже, чем в Тг. Задание скорости
Рис. 5-2 при использовании импульсных датчиков задание скоростн и формирование сигнала об отклонении скорости производятся в цифровой форме. Сигналы в такой форме используются для построения цифровых систеь! управления либо преобразуются а форму аналоговых сигналов для построения цифроаналоговых систем управления. На рис. 5-2 показана функциональная схема цифровой системы обработки информации о скорости электропривода [20]. Задание скорости производится в цифровом виде скачком либо в виде временной функции. Во втором случае используется цифровой за- Датчнк интенсивности (ЦЗИ). С помопуэЮ этого задатчика, как и в аналоговых системах, формируются сигналы режимов разгона и торможения электропривода. Развернутая функциональная схема ЦЗИ показана на рис. 5-3 t43l. Задание скоростн в виде числа N3 поступает на вход устройства сравнения кодов (УСК), где происходит сравнение Лз с выходным числовым значением Лз- Если значение N3 оказывается большим на выходе УСК появляется сигнал больше (Б), которым открывается ячейка совпадения, и импульсы с частотой fпоступают на вход сложения счетчика (Сч). Число иа выходе ЦЗИ Рнс, 5-3 в общем случае изменяется по закону где ent - целая часть числа в скобках. Если частота /д., = const, то Лз(0 = еп1[/д.,а т е. происходит линейное во времени изменение числа Лз. В момент равенства чисел Лз н Лз сигнал больше на выходе УСК исчезает и импульсы через ячейку совпадения на Сч не проходят. Число Лз сохраняется на выходе ЦЗИ до тех пор, пока вновь не произойдет изменеине входного числа Лз- Если происходит уметь-шение числа задания N3, то на выходе УСК появляется сигнал меньше (М), которым открывается ячейка совпадения, и импульсы с частотой /дпоступают иа вход вычитания счетчика Сч. Выходное число ЦЗИ будет линейно уменьшаться до Л. Устройство задания скорости (УЗС) может быть либо локальным для конкретной системы электропривода (тогда число N вырабатывается в результате действия оператора), либо представлять собой управляющую вычислительную машину (тогда число N будет являться одной нз команд машины). ИнтеисивЕюсть изменения Ng во времени зависит от частоты Если /д меняется, то меняется и интенсивность изменения N. Для регулирования интенсивности в ЦЗИ предусмотрен управляемый делитель частоты (УДЧ), на вход которого поступает опорная частота fo от генератора эталонной частоты (ГЭЧ), а выходная частота зависит от числа ЛГз.д, поступающего из устройства задания интенсивности (УЗИ). ЦЗИ имеет числовой выходной сигнал, квантованный только по уровню, и поэтому он ие вносит возмущений в систему управления в установившемся режиме. Измерение действительной скорости электропривода в цифровой системе обработки информации (см. рис. 5-2) может производиться двумя способами в зависимости от уровня скорости, диапазона регулирования и требуемой динамической точности. Первый способ основан на подсчете импульсов, поступающих от импульсного датчика скорости (ИДО за фиксированный интервал времени То, определяемый частотой дискретизации цифровой системы (То = = 1 о). Задание частоты /<, производится через делитель Д от ГЭЧ. Значение текущей скорости электропривода в момент t - iT будет пропорционально числу подсчитанных импульсов: где п - число импульсов датчика за интервал вреьсенп f(/ - 1) То, iTJ; Z - число импульсов, приходящихся на один оборот датчика, 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 [54] 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
|||||||||||||||||||||||||