
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 [58] 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 при скачкообразных изменениях момента сопротивлений опти-мальны. Если характер изменения момента сопротивлений другой, то применяются и другие подходы к оптнмизацнн ССС, рассмотрен! ные в п. 5-1-3. Изменения для ССС настроек параметров регуляторов внутренних подчиненных контуров регулирования тока и напряжения по сравнению с традиционными настройками, рассмотренными в гл. I, ие эффективны, так как эти изменения оказывают малое влияние на динамическую ошибку системы. Следует только огу.е-тить, что если постоянная времени электромагнитной цепн оказывается много больше малой некомпенсируемой постоянной времени контура, то внутренний контур целесообразно настраивать, так же как и контур регулирования скорости, на симметричный опти-мум Это может обеспечить меньшую дниа.чическую ошибку по скорости при интенсивных изменениях напряжения сети. 5-2-2. ЦИФРОАНАЛОГОВЫЕ И ЦИФРОВЫЕ ССС ТОЧНЫХ ЭЛЕКТРОПРИВОДОВ Цифроана.чоговые системы управления электроприводами, так же как и аналоговые системы, структурно могут выполняться по принципам подчиненного управления. Цифровая часть системы в этом случае относится в основном к контуру регулирования скорости и включает в себя цифровую систему обработки информации о скорости электропривода и ци4фовой РС Аналоговая часть системы включает в себя внутренние контуры регулирования тока, напряжения и других параметров электропривода. Согласование цн4)овой части с аналоговой выполняется с помощью циоаяа-логового преобразователя (ЦЛП). 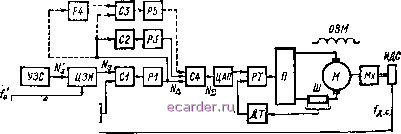 Рис. 5-6 Цифроаналоговая система управления скоростью электропривода постоянного тока с цифровой информационной системой, рассмотренной в п. 5-1-2, показана иа рис. 5-6. В системе управления применен аналоговый контур регулирования тока якоря двигателя, заданием для которого является выходной сигнал ЦЛП. Ограничение тока якоря выполняется путем ограничения выходного напряжения ЦАП, Если для управления электроприводом достаточно использовать пропорциональный PC, то сигнал ошибки Лд с выхода регистра Pt поступает в ЦАП и преобразуется в сигнал задания для контура регулирования тока. При необходимости реализации более сложных PC в систему вводятся дополнительные регистры, предназначенные для приема, промежуточного хранения и выдачи информации в процессе выполнения вычислительной операции,и сумматоры, выполняющие операции арифметического суммирования. Так, если до!Юл-иительно к пропорциональной составляющей PC необходимо ввести интегральную составлякяцую, т. е. получить ЯЯ-регулятор, то выполняется это посредством последовательного алгебраического суммирования текущих значений отклонения скорости Лд {1Т) в накапливающем сумматоре С2 и последующего запоминания результата в регистре Р5.0тдельные составляющие сигнала регулирования скорости суммируются на сумматоре С4, н его выходной сигнал в виде числа iVs поступает в 1XAU, Если необходимо реализовать ЯЯД-регулятор скорости, то дополнительно к пропорциональной и интегральной составляющим вводится дифференциальная составляющая (на рис. 5-6 ввод показан штрихами). В этом случае из текущего значения ошибки Лд (17) алгебраически вычитается с помощью сумматора значение ошибки Л/д Щ-1) Т] в предыдущий период времени Т, Результат вычитания запоминается в регистре Р5. Значение ошибки в предыдущий период хранится на интервале в регистре Р4. ПИД-закон управления в цифровой форме записывается выражением (iTo) = hiN (iTo) + As S /Va {IT,) + feg {N ЦТ,) - [{i - 1) T,]\; N(iT,) = NAiTo)~N{iT,), где {iTo), Лм (iTq) - заданное и действительное значения скорости, выраженные в цифровой форме на i-u такте вычисления; Лд (t7о) - сигнал отклонения скорости от заданного значения в цифровой форме на г-м такте вычисления; ki, k, - масштабные коэффициенты. Реализацию цифрового PC и блоков цифровой информационной системы удобно выполнить, если управление электроприводом и другими системами, входяшлми вобъектавтоматизации, производится от ЦВМ. Тогда эта реализация сводится к составлению программы работы ЦВМ. Для локальной цифроаналоговой системы электропривода применяется более простой вариант системы, функциональная схема которой показана на рис. 5-7 [8]. Как н в предыдущей системе, задание на скорость электропривода вводится в форме числа N. Но далее число преобразуется в частоту в преобразователе код-частота {ПКЧ). Эта частота и определяет установившуюся скорость электропривода. Регулятор скорости состоит из цифрового интегратора ЩИ) иана-логового пропорционального звена, совмещенного с аналоговым сум- матором С. Если ЦИ исключить из схемы, то будет обычная аналоговая система регулирования скорости с подчиненной обратной связью по току и /7-регулятор ом скорости. Напряжение задания Мд на входе системы формируется нз частоты с помощью преобразователя частота-напряжение (/7УЯ/). Сигнал обратной связи Ид.с формируется из частоты / дс импульсного датчика скорости (ИДС) с помощью преобразователя частота -напряжение {ПЧН2). 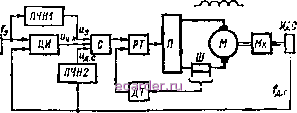 Рис. 5-7 Цифровой Интегратор состоит нз трех основных узлов: узла разделения входных импульсов во време*1Н, реверсивного счетчика и преобразователя код -напряжение . Узел разделения входных импульсов частот и распределяет импульсы во времени таким образом, чтобы импульсы одной последовательности поступали только во время пауз в другой последовательности. Тем самым предотвращается поступление на вход реверсис-ного счетчика совпадающих импульсов, которые нарушают его работу. Переходная функция ЦИ прн постоянном значении частот входного сигнала / показана на рис. 5-8. Такая переходная функция соответствует звену с передаточной функцией 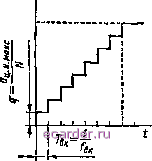 Рис. 5 8 (5-6) где 9 = ц.и.макс/Л - дискретное приращение выходной величины; Нц. .,якс - максимальное напряжение на выходе ЦИ; N - цифровая емкость счетчика ЦИ; Т ~ I/fjj - период следования входных импульсов. Раскладывая е~вх° в степенной ряд -т. Т- о- И 21 31 и ограничиваясь двумя первыми членами разложения, можно запя-178 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 [58] 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
||||||||||||||||||||