
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 [63] 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 http://www.melcom-ural.ru/ - компрессор воздушный цена. поступающего от устройств задания скоростн (УЗС). Делается это с помощью задатчика интенсивности {ЗИ). i V 2 3 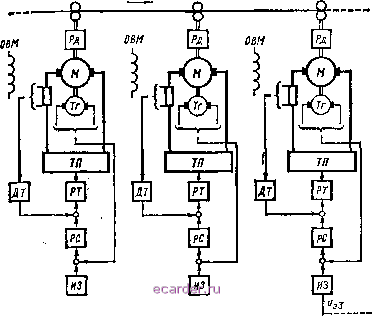
Рис 5-17 УЗСС могут включаться таким образом, чтобы обеспечить слс-Дуюшле способы управления локальными электроприводам;:: 1) с параллельным (независимым) управлением; 2) с последовательным (каскадным) управлением, когда с изменением скорости предыдущего электропривода изменяются к определенном соотношен!:! скорости последующих электроприводов; 3) с комбинированным управлением, сочетающим в себе способы параллельного н последовательного управления. Реализация этих способов в аналоговых системах выполняется с помощью масштабных операционных усилителей (рис. 5-18, а, б). При последовательном управлении локальными электроприводами масштабные усилители включаются последовательно (рис. 5-18, а). Соотношения скоростей локальных электроприводов в общем Де определяются равенством с.с(+1 A-cf+i - коэффициент устройства задания соотношения сноро-принимаюыщй значения как больше, так к мейыпе единицы. требуемое значенне коэффициента fec.c устанавливается с помощью регулируемого сопротнвлення в цепн обратной связи усц, лнтеля. При изменении напряжения Mg.o (рис. 5-18, а) соответственно изменяются напряжения за н Щз. Ц3З = Йс.сззй ~ Ас.с3с.е2а.<> - н изменяются скорости всех локальных электроприводов, а соотношения скоростей остаются прежними. Если э.о = const, а и изменится путем изменения коэффициента соотношения скоростей fe(..c2 то изменятся н все последующие напряжения задания зз з4 и т. д., а следовательно, и скорости соответствующих локальных электроприводов. Влияние же изменения K.z на предыдущее напряжение задания отсутствует нз-за свойств операционных усилителей. [УЗСС \УЗСС £ Рис. 5-18 Прн параллельном управлении локальными электроприводами масштабные уснлителн включаются независимо друг от друга (рис. 5-18, б) н изменение одного нз напряжений задания не приводит к изменению других напряжений задания, В такой схеме соотношення скоростей локальных электроприводов устанавливаются в соответствии с равенство.м k * c.ct <0; где ftc.Ci = 3.l7 3.o; = 3i-.l/ 9.0 при изменении коэффициента соотношения скоростей одного нз локальных электроприводов изменяется скорость только этого электропривода н, следовательно, соотношение скоростей дву рядом расположенных электроприводов. Соотношення скоростей остальных электроприводов остаются неизменными. Регулирование обшей скорости всех электроприводов происходит так же, как и при последовательном управлении. При комбинированном управлении соотношением скоростей применяются оба способа включения масштабных усилителей, показанные иа рис. 5-18, о, б. Инерционные звенья ИЗ, устанавливаемые на входе локальных систем управления электроприводами (см. рис. 5-17), предназначены для уменьшения больших перерегулирований по скорости при изменении задания на соотношепья скоростей электроприводов. Это обусловлено тем, что системы регулирования скорости рассматриваемых электроприводов настраиваются на симметричный оптимум, для которого характерны большие перерегулирования по скорости прн скачкообразных изменениях напряжений задания. Такие изменения задания производятся при изменении сопротивлений регулируемых резисторов в устройствах задания соотношений скоростей. Взаимосвязь локальных систем управления электроприводами через общее обрабатываемое полотно имеет место в тех случаях, когда движение полотна в межсекционном промежутке происходит с определенным значением натяжения F. Основные соотношения, характеризующие взаимосвязь электроприводов через полотно, могут быть установлены иа основании схемы, представленной на рис. 5-19, а. Для простоты рассмотрения предполагается, что радиусы всех приводных валов одинаковы: /-1 = /-2 = гз = г, а упругие деформации в кинематической цепи двигатель - приводной вал каждого из электроприводов отсутствуют в рассматриваемой полосе частот. В связи с тем что схема, показанная на рис. 5-19, о, является частью более общей схемы, действие на полотно приводных валов, предшествующих валу / и следующих за валом 3, учтено в виде их реакций Fl и f. При рассмотрении динамических процессов в натянутом в межсекционном промежутке полотне делаются следующие допутдеиия: 1) полотно однородно н имеет по всей длине одинаковую толщину и ширину; 2) вес материала не влияет на его деформацию; 3) деформация в полотне имеет упругий характер, причем равномерно распределяется по поперечному сечению; 4) волновые процессы, связанные с распределением деформации по длине, несущественны; 5) проскальзывание движущегося полотна относительно приводных валов отсутствует. Поведение полотна на участке растяжения длиной (рис. 5-19, а) Описывается дифференциальным уравнением = [2-tMl+e2)], (5-12) 7 А в Башарин 193 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 [63] 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
||||||||||||||||||||||