
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 [64] 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 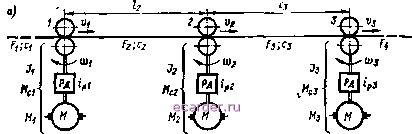 Ло>1 -I- 0 H.h(p)\ я.ц2 Тя.ц2Р*1 A Us Лес? *Д мг Рис. 5-] 9 {Д%сг где 6- - - относительное удлинение; и - линейные скорости полотна в начале и в конце участка растяжения; Д?а - абсолютное значение растяжения. Натяжение, возникающее в материале, связано со значением Д/д выражением F2 = C2Ali = Csl2e2, (5-13) ,д2 j., - коэффициент жесткости полотна при растяжении. пЬдставляя в (5-13) значение из уравнения (5-12) и записывая уравнение равнозесия моментов в электроприводе / для случая, когда параметры электропривода приведены к приводному валу, получим систему уравнений Мх - Ма + {Fi -F,)r- /icoip = 0; f 1 = Win г С, 2= [2-1(1 +2)]; tF2, (5-14) где Ml и Mci - момент электродвигателя н момент сопротивлений, приведенные к приводному валу; - приведенный момент инерции; р - d/dt. Аналогично для электроприводов 2 п 3 Ма - Л1с2 -[- (f 3 ~ Fa) г - /ОаР = 0; = togr; Мз - Мз -f (4 -Fa)r- Js<Osp = 0; = Из/-. (5-15) Системы уравнений (5-14) и (5-15) являются нелинейными из-за наличия произведений иеа н ие. Рассматривая для ССС переходные процессы в приращениях координат относительно начальных значений, можно записать системы уравнений в следующем виде: - ДМе1 + (Af 2 - Fi) г -JI Awtp = 0; Ди = Acoir; := [Ди.г - Ди1 (I -f взнач) - 1нач Л, = F, - ДМ,2 -1- (AFs - Дз) г - Уз Асоар = 0; Ду. = Дсоаг; - Af2 (1 -i- Езнач) - У2нач Аёз]; ДЕз = AFg; AMg - ДМсз + (AF4 - AFa) г - Уа Асозр = 0; ДУз = АсозГ. (5-16) где V 1!1ач гнач - начальные значения линейных скоростей движе- ния полотна; е, е, удлинений. начальные значения относительных в связн с тем что начальные значения относительных удлинений эиач ч зяпч оказываются много меньше единицы, можно в уравнениях системы (5-16) считать справедливымп приближенные равенства 0+2и..)и (1+ез ,)1. (5-17) Структурная схема трех электроприводов, взаимосвязанных движущимся полотном, полученная на основании системы уравнений (5-16) с учетом (5-17) и дополненная структурными схемами локальных систем управления, взаимосвязанных по цепям задания общей скорости и соотношений скоростей, показана на рис. 5-19, б. На схеме приняты следующие обозначения: Т = -г/Уыач! Те, = - з/Укач - постоянные времени, характеризующие скорость процесса изменения удлинения полотна на участках 4 и l, k ~ = (с./.,)/ ; кз = {Сз1з)1Щ;пч\ ipv ip-z> ip3 - передаточные числа редукторов. Обозначения элементов структурных схем локальных систем управления приняты такими же, как и в гл. 2, с учетом принятой на схеме рис. 5-19, о нумерации электроприводов. На основании структурной схемы может быть выполнен синтез регуляторов и расчет переходных процессов по скорости и натяжению с учетом взаимосвязей систем управления. Это может быть выполнено методами моделирования на АВМ или ЦВМ, рассматриваемых в гл. 10 и 11. Синтез регуляторов локальных систем управления для каждого из электроприводов может быть выполнен в частном случае в соответствии с методами, изложенными в гл. 2. На основании полученной структурной схемы можно также выявить условия, при которых взаимной связью электроприводов через обрабатываемое полотно можно пренебречь. Рассмотрим это на примере взаимосвязей электроприводов i к 2. Предположим, что происходит изменение только скорости Дсо. а = 0. Тогда упругий момент АМу = AFr будет определяться только скоростью = rAtda- Приводя связь по моменту АМу.2 на вход системы н определяя эквивалентную передаточную функцию Ws (р) двух параллельных связей по координате Ащ до входа системы, получим: Иэ(р) = *л.с. где йща (р) = цт> п2/г-WT~n ~ передаточная функция разомк- нутой системы регулированпя скорости. Если в области существенных частот для системы регулирования скорости 3 справедливо неравенство kr 1 1 то влиянием упругих деформаций в движущемся полотне на динамику системы молено пренебречь. В этом случае можно также 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 [64] 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |