
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 [65] 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 енебречь и взаимосвязью по цепи нагрузки систем управления ектроприводамн 2 и / и рассматривать их как автономные системы. Аналогичные условия могут быть получены относительно взаимосвязи электроприводов 2яЗ. 5-3-3. ЦИФРОАНАЛОГОВЫЕ И ЦИФРОВЫЕ СИСТЕМЫ УПРАВЛЕНИЯ СКОРОСТЬЮ И СООТНОШЕНИЕМ СКОРОСТЕЙ ВЗАИМОСВЯЗАННЫХ МНОГОДВИГАТЕЛЬНЫХ ЭЛЕКТРОПРИВОДОВ Цифроаналоговые п цифровые системы управления скоростью и соотношением скоростей многодвигательных электроприводов выполняются с использованием локальных цифроаналоговых и цифровых систем управления, рассмотренных в и. 5-2-2 и взаимосвязанных по цепн управления цифровыми устройствами задания скоростн и соотношения скоростей. На рнс. 5-20 показана функциональная схема цифроаналоговой системы управления тремя электроприводами [201. Каждая из локальных систем выполняется по схеме системы с цифровым интегратором. Управление соотношением скоростей производится в цифровой форме по схеме последовательного управления, аналогично тому, как это делается в аналоговых системах. На частотные входы ПКЧ каждой из систем управления ведомыми электроприводами поступает частота задания из .предыдущей системы. На частот--ный вход ПКЧ системы ведущего электропривода I поступает частота /о с генератора эталонной частоты. Регулирование соотношения скоростей производится изменением чисел Л1,2 и N2.3 с помощью устройств задания соотношения скоростей, Эти числа пропорциональны соответствующим коэффициентам соотношения скоростей; 3 - электроприводов 2 и /; с.с? - электроприводов 3 и 2. Одновременное регулирование скорост1{ всех глектроприводов производится путем изменения числа Лх- Частота задания /31 системы управления электроприводом / является ведущей частотой. Частоты задания систем управления электроприводами 2 м 3 определяются через коэффициенты соотношения скоростей /а2 с, сг/з1 Достоинством последовательного управления соотношением скоростей мпогодвигательных электроприводов в цифровой форме является отсутствие нестабильности коэффициентов kc.d- При последовательном управлении большим числом электроприводов f oroBHX системах накопленная погрешность (юрмировання с.с i вследствие дрейфа напряжений масштабных усилителей может оказаться слишком большой и применение аналоговой системы - недопустимым. 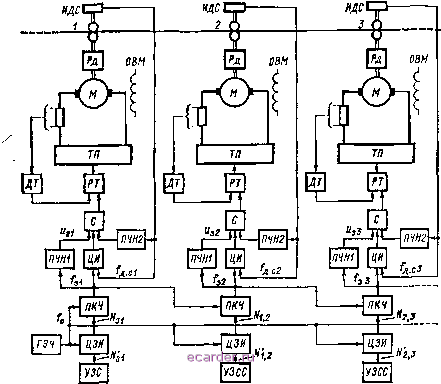 Рис. 5-20 Прн необходимости реализации параллельного управления соотношением скоростей локальных электроприводов частота fo генератора эталонной частоты поступает на частотные входы всех ПКЧ. Устройство задания скорости каждой системы управления электроприводом будет в этом случае одновременно являться и устройством задания соотношения скоростей, Аналогично рассмотренной цифроаналоговой системе управления многодвигательным электроприводом с цифровыми интеграторами могут выпшшяться и другие цифроаналоговые н цифровые системы управления. ГЛАВА ШЕСТАЯ АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ МЕХАНИЗМА 6-1. ПРИНЦИП ПОСТРОЕНИЯ СИСТЕМЫ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ Системы регулирования положения представляют собой класс систем с чрезвычайно широким диапазоном назначений. Они находят применение в различных промышленных установках и роботах в качестве систем наведения антени, оптических телескопов, и радиотелескопов, для стабилизации различных платформ в условиях качки оснований, на которых монтируются эти платформы, и т. д. Мошдость исполнительных двигателей составляет от единиц и десятков ватт до десятков и сотен киловатт, нх питание осущест-рляется от электромашинных, тиристорных преобразователей или транзисторных усилителен мощности. Большую группу приводов с регулированием положения составляют гидравлические и пневматические приводы, которые здесь не рассматриваются. Контроль положения осуществляется с помощью датчиков, которые в аналоговой нлн дискретной форме дают информацию о перемещении рабочего органа механизма на протяжении всего пути, в качестве датчиков используются сельсины, вращающиеся трансформаторы, индуктоснны, импульсные и цифровые датчики и др. в большинстве случаев мощные промышленные системы управления положением строятся сегодня по принципам подчиненного регулирования прн питании двигателей постоянного тока от ТП. При этом внутренние контуры тока и скорости выполняются, как это было описано в п. 2-2-2, н к ним добавляется цифровой нли аналоговый контур регулирования положения. На рис. 6-1 показана схема системы управления положением, в которой при переключении переключателя П может быть осуществлено замыкание аналогового или цифрового внешнего контура. В первом случае измерительным элементом являются сельсины, работанщие в трансформаторном режиме. Сельсин-приемник (СП) связан с исполнительным органом {ИО), который приводится двигателем Л! через редуктор Рд. Подача иа вход управляющего воздействия, которым является поворот сельсина-датчика {СД) на некоторый утл фу относительно согласованного с сельсином-приемником положения, вызывает появление на его однофазной обмотке напряження переменного тока сс.д) значение которого определяется значением угла рассогласования, а фаза - направлением поворота относительно согласованного положения, т. е. знаком угла. С помощью фазочувствительного выпрямителя (ФВЧ) это напряжение выпрямляется, причем полярность напряжения Иф ,в определяется знаком рассогласования. Напряжение, 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 [65] 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |