
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 [66] 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 появившееся на выходе регулятора положения (РЯ), воздействует иа вход коитура скорости, п двигатель вращается, отрабатывая рассогласование до тех пор, пока ие установится равенство ф ф. Параметралнс, характеризующи\ш неизменяемую часть коитура пачожения, являются передаточное чнсло редуктора (, коэффициент передачи пары сельсинов связывающий напряжение на выходе СД с угловым рассогласованием йф, и передаточный коэ<ж1Нцнент фазочувствительиого выпрямителя Лч-п- Хотя зависимость с.л / (ф) имеет синусоидальный характер, можно считать, что ~ const, так как уже при сравнительно небольших значениях напряжения н.д регулятор положения ограничивается, т, е. замкнутому контуру положения соответствует работа в начальной, близкой к линейной части синусоиды. 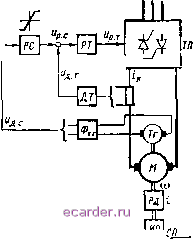 *сс.д Рис. 6-! В ряде случаев для повышения точности работы при малых рассогласованиях система снабжается датчиками грубого н точного отсчетов. В этом случае в диапазопе малых углов рассогласования работает система точного отсчета, в которой датчик соединен с валом ИО через повышающий редуктор, а прн больших рассогласованиях контроль положения осуществляется датчиком грубого отсчета, непосредственно связанным с исполнительным валом. при ограничении выходного напряжения ЯЯ значением i/p..op максимальная скорость двигателя не превышает номинального значения а) . В цифровом контуре положения измерительным элементом является дискретный датчик обратной связи (ДОС). С помощью схелш преобразования (СП) с него снимается сигнал в двоичной коде, благодаря чему датчик вместе со схемой преобразования представляет собой преобразователь угат - код (ПУК) илн преобразователь линейное перемещение - код . Вычислительное устройство (ЗУ), сравнивая полученные в цифровой форме предписанное значение (задание) н истинное значение, определяет код ошибки, а также вырабатывает в цифровой форме корректирующий сигнал (например, интеграл или производную от ошибки) и преобразует результат вычислений в напряжение, действующее на вход контура скорости. Одним из наиболее перспективных направлений прн создании цифровых систем управления положением является применение упр,5Нляющих цифровых вычислительных машин (ЦВМ). Характер связи ЦВМ с системой управления приводом может быть различным. По принципу действия ЦВМ выполняет необходимые математические операции в течение определенного времени, иазывае>[ого периодом дискретности. Если на ЦВМ возложено решение большого круга сложных задач по управлению всем технологическим процессом и рассматриваемая система управления патожением является одной из многих локальных систем, то период дискретности не может быть сделан достаточно малым и использование ЦВМ в контуре регулирования оказывается нерациональным. Тогда система управления положением выполняется как автономная. Задачей ЦВМ в этом случае является выработка предписанного значения перемещения в цифровом виде. В неавтономной системе ЦВЛ1 включается в контур регулирования и задачи, выполняемые в автономной системе ВУ, возлагаются на ЦВМ. В цифровом контуре регулирования значение величины, полученное в результате математических действий, выполненных в течение данного периода дискретности, обычно остается неизменным и в последующий период дискретности. Таким образом происходит процесс квантования по врел{ени, представляющий собой процесс превращения непрерывной функции времени в ступенчатую. Кроме того, цифровое представление величин характеризуется тем, что возможна фиксация не любых значений величины, а ряда значений, отличающихся друг от друга на единицу младшего разряда. Так происходит квантование по уровню. Сочетание этих особенностей приводит к тому, что цифровой контур представляет собой нелинейную дискретную систему [7]. В общем случае структуру цифровой системы регулирования пачожения можно представить в виде рис. 6-2, а [32]. Цифровые корректирующие устройства ЦКУ и ЦКУ2 обрабатывают информацию соответственно в ЦВМ н ВУ, реализуя принятые законы управления. Звенья постоянного запаздывания e~, е, е = учитывают время, затрачиваемое ЦВМ, ВУ и ПУК на обработку информации. Эффект квантования по времени учитывается вве-даннем импульсных элементов (ключи), имеющих периоды дискрет-иостн Ti, Т2, Т. Эффект квантования по уровню отображается нелинейными элементами НЭ1, НЭ2, ИЭЗ, имеющими релейную характеристику с числом ступеней п = 2*-1, где а - чнсло используемых двоичных разрядов. Экстраполятор Э преобразует дискретный сигнал в непрерывный. Еслн применен экстраполятор нулевого порядка, то его задача состоит в запоминании информации в течение времени, равного периоду дискретности Т- Передаточная функция его в этом случае есть 1 -е~ Выходное напряжение экстра1юлятора воздействует на аналоговую неизменяемую часть контура положения с передаточной функцией 1Ги,р (р). ~т L. Щ Гг. ВквЭ
Рис. 6-2 Рассмотренная структурная схема автономной системы в большинстве случаев может быть значительно упрощена. На рнс. 6-2, б изображена схема, в которой не учтено квантование по уровню. Кроме того, считается, что периоды дискретности и Tg равны между собой и значительно метьше периода дискретности Ti. Синтез автономной системы регулирования положения в этом случае может быть осуществлен методами, разработанными для непрерывных систем. Сказанное позволяет, ограничиваясь рассмотрением автономной системы, оперировать с передаточными функциями аналогового 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 [66] 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
|||||||||||||||||||||