
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 [67] 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 контура положения, имея в виду, что вместо Асф..в надо пользоваться коэффициентом, характеризующим крутизну характеристики ВУ совместно с ПУК в вольтах на радиан. 6-2. СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ МЕХАНИЗМА в РЕЖИМЕ ПОЗИЦИОНИРОВАНИЯ б-2-t. НАСТРОЙКА в РЕЖИМЕ МАЛЫХ ПЕРЕМЕЩЕНИЙ Позиционированием называют такой режим работы системы управления положением, при котором задачей системы является перемещение рабочего органа механизма из одного фиксированного положения в другое. Характер траектории перемещения при этом важен лишь постольку, поскольку он обеспечивает минимальное время перемещения, т. е. максимальную производительность механизма, без сколько-нибудь значительного перерегулирования по положению. Позиционные системы находят широкое распространение в различных отраслях техники, в частности в металлургии, станкостроении, подъемно-транспортных механизмах и др. При рассмотрениипозиционной системы (сч. рис. 6-1) различают: а) малые перемещения, при которых ни один из регуляторов не ограничивается н система работает как линейная; б) средние перемещения, прн которых отработка происходит при ограничении регулятора скорости (PC), т. е. при ограничении якорного тока, но участок работы с постоянной скоростью отсутствует; в) большие перемещения, при отработке которых в течение определенного времени двигат&чь работает на установившейся скорости в результате ограничения РП, а PC ограничивается при разгоне н торможении. Будем рассматривать настройки контура положения в о. е., выбрав за базовые значения Mq = m ojq = а>я, / .б = М/с д.с.б = д.Л- Базовое значение напряжения РП должно быть определено как t/р.п.б= Ад.сй>н/?з.с/с, где R и i - входные сопротивления PC. За базовое значение угла принимается угол, на который повернется исполнительный вал при постоянной скорости двигателя щ за некоторое время Iq : Ц) - Тогда уравнение, связывающее скорость двигателя и угол поворота исполнительного вала ф = (i>/{pi), в о. е. будет (р = Щ1р). Если, рассматривая аналоговый контур положения, принять за базовое значение напряжения фазочувствительного выпрямителя /ф.ч.п.бАГф.ч.вссФб) то передаточная функция разомкнутого контура положения будет иметь вид W{p)W. ip)W{p). Заменяя для определения параметров РП замкнутый контур скорости апериодическим звеном ВДз (р) СшР + О нетрудно видеть, что для настройки системы на оптимум по модулю (ОМ) надо применить пропорциональный Pf7 прн П.ЛР) = *р.. = 2-. где Тшэ = 2Тцщ - эквивалентная постоянная времени замкнутого контура скорости. Удобно за базовое значение времени принять = ! с. Тогда Поскольку числитель имеет размерность времени, коэффициент РП в о. е. безразмерен. 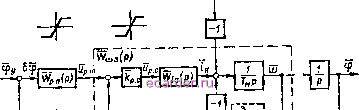 > 1 L----1 Рис. 6-3 Связь между коэффициентом усиления РП в о. е. и а. е. прн Ц = \ с получается в виде к =к (6-2) Структурная схема системы при записи переменных в о. е. и в предположении, что обратной связью по ЭДС двигателя можно пренебречь, приведена на рис. 6-3 (влияние показанного штриховыми линиями блока, моделирующего сухое треине, рассматривается в п. 6-4-1). В настроенной таким образом системе отработка малого ступенчатого управляющего воздействия будет соответствовать сплошной кривой (см. рис. 1-7, а) прн Дйвых Дф - Дфу. о.с - -i при действии на механизм активного момента нагрузки заданное положение будет поддерживаться со статической ошибкой. Непосредственно из структурной схемы при Wpj, (р) = kp, очевидно, чго в статике, когда Q = ф = О, а передаточный коэффициент замкнутого контура тока равен единице, ее значение будет определяться как р. Ti p. с При этом якорьнеподвижного двигателя обтекается током, соответствующим значению момента нагрузки 1 = М- Однако обычно для систем позиционирования режим малых перемещений не является характерным, а выбор значения коэффициента передачи РП по формуле (6-1) прн средних и большпх перемещениях может не обеспечить требуемого характера отработки. 6-2-2. ПОЗИЦИОННАЯ СИСТЕМА ПРИ ОТРАБОТКЕ СРЕДНИХ И БОЛЬШИХ ПЕРЕМЕЩЕНИЙ. РЕАЛИЗАЦИЯ ТРЕБУЕМОГО ЗАКОНА ПЕРЕМЕЩЕНИЯ В большинстве промьпиленных электроприводов, оснащенных nosnuHOHHHNHi системами, наилучшим считается такой пр оцесс отработки среднего перемещения, при которш скорость изменяется по треугольному графику. Это позволяет в полной мере использовать перегрузочную способность двигателя и исключает возникновение перерегулирования по положению. Для обеспечения такого характера отработки при данном значении заданного перемещения требуется определенное значение коэффициента передачи РП. При рассмотрении отработки системой средних п больших перемещений обычно делается упрощающее допущение [381: считается, что токовый контур обладает высоким быстродействием, а постоянная времени фильтра тахогенератора Тдравна нулю, т. е. что им~0, благодаря чему передаточный коэффициент PC yfep.c достаточно велик. Тогда даже небольшое напряжение на выходе РП приводит к ограничению PC. Пусть в момент времени на вход системы (рис. 6-3) подается управляющее воздействие в виде заданпя на перемещение фу (в аналоговом контуре системы рис. 6-! сельсин СД поворачивается на угол фу относительно согласованного положения). Если оно достаточно велико, напряжение на выходе РП достигнет значения ограничения t/p.n.orp (рис. 6-4, а). Сразу же ограничится и PC. Если = - const, то разгон двигателя под действием мо- мента /п, а с - будет происходить при постоянном ускорении. В момент времени 4, зависящий от значений kp- и tp.n.orpi РП выйдет из ограничения и его напряжение будет далее меняться О закону Нр.п = йр.пвф. где б<р = фу - ц-. Это, однако, не повлечет за собой изменения характера разгона, так как PC остается 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 [67] 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |