
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 [68] 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 по-прежнему ограниченным. В момент времени 2 скорость станет равной щ, а перемещение достигнет такого значения (Ti. ри ко- тором будет выполняться °/ Isi равенство р.п(Фу-Ф1)=Эъ (6-3) означающее, что сигнал с РП н сигнал обратной связи по скорости равны друг другу, в следующий момент времени сигнал обратной связи превысит напряжение РП и напряжение на выходе PC, а следовательно, и ток якоря поменяют знак. Начавшийся процесс торможения должен закончиться в момент времени t, когда рассогласование станет равным нулю. При 5р.п5ф71 выражение для тока якоря будет иметь вид = /я.мо1сс sign (ftp.n 6ф - ш). Еслн момент нагрузки имеет пассивный характер и не зависит от скорости, т, е. Л?с = Sign й, го ускорение при разгоне 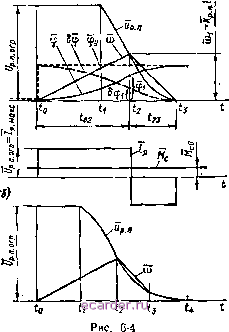 а при торможении dt J Имея 8 виду, что ускорения постоянны, легко определить время разгона и торможения: u>l! 23 - ЯМ, Тогда перемещение в радианах, которое будет отработано при рассматриваемом графике скорости, Ф = Фу = 2 2 + 23) = 7 где М а с = Сд/я. акс- макс мако J tt Переходя ко. е. и учитывая, чтоф = а J/Mq = получим ф = ф = Ь Щ-Ь.}- прн = I С выражение упрощается: = Ь = Т.и, (6-4) я. макс CQ После подстановки сюда щ в соответствии с выражением (6-3) значение требуемого коэффициента усиления РП определится как 7мфу(1- Р1/ЧРу)2 /я. На основании рис. 6-4, а можно записать фу 02 + 23 После подстановки сюда выражений *02 - -7г~ ®1 Газ -г:- ©1 = - Лмкс --Л1со я. МКС - Лсо а результатов - в выражение для Лрц получается V Гифу я.макс -со Отсюда видно, что значение Ар.п, которое при данном максимальном токе обеспечивает отработку заданного среднего перемещения без перерегулирования и дотягивания, должно быть разным для разных заданных перемещений ф.. н значений момента нагрузки MQ. Прн других значениях заданного перемещения н неизменном значении fep. график скорости будет отличаться от треугольного. На рис. 6-4, б показан характер изменения напряжения иа выходе РП и скорости двигателя при меньшем значении фу. Во время разгона от ДО 4 закон изменения ф остается таким же, как и в предыдщем случае, так как он определяется лишь значением я.маис - Йсо- Однако, так как значение заданного перемещения меньше, равенство (6-3) обеспечивается при меньшем значении скорости. В момент времени tg сигналы на входе PC снова сравняются и он выйдет нз ограничения. При принятом допущении о высоком значении йр.с примерное равенство йр.с ш будет соблюдаться на протяжении всего оставшегося пути. Ток якоря станет меньше максимального, что приведет к снижению темпа торможения по сравнению с торможением прн треугольном графике скорости, и отработка перемещения в течение времени - будет происходить с меньшим, чем раньше, ускорением, т. е. с дотягиванием. При значении qy большем, чем входящее в выражение (6-5), перемещение будет отрабатываться с перерегулированием. Если применяется пропорциональный РП, то прн определении fep.n по формуле (6-5) исходят нз требовапня отработки по треугольному графику скорости некоторого настроечного перемещения. За него обычно принимают такое, при котором он == сОц, т. е. ©1 = 1 для случая 0. На основанпи (6-4) оно состав- ляет Фу. астр TJ/H.iaKc- После подстановки фу -- сгу.иастр в выражение для kp u получается требуемое для обеспечения треугольного графика скорости при настроечном перемещении значенне коэффициента передачи РП р,п-%. (6-6) При этом, поскольку значение р.п.огр должно обеспечивать скорость ш = = 1, момент времени на рис. 6-4 совпадает с моментом i. Все перемещения, меньшие настроечного, будут отрабатываться с дотягиванием, но перерегулирования, нежелательного в системах позиционирования, не будет. Перемещения, превышающие настроечное, будут относиться к большим, так как после достижения двигателем скорости й = = 65 = 1 рассогласование бф будет еще достаточно большим, чтобы РП не вышел из ограничения. Тогда средняя часть перемещения будет отрабатываться с постоянной, равной номинальной, скорсютью в график скорости станет трапецеидальным. 6-2-3. ПАРАБОЛИЧЕСКИЙ РЕГУЛЯТОР ПОЛОЖЕНИЯ Близкий к треугольному график скорости прн любом, меньшем настроечного, значении перемещения может быть получен при использовании РП с нелинейной статической характеристикой. Рассмотрим режим идеального холостого хода, когда Л1с = О, Тогда в соответствий с (6-5) надо выбрать При этом график скорости будет представлять собой равнобедренный треугольник и в момент перехода от разгона к торможе-. нню перемещение будет равно = фу/2 = бф. Напряжение на выходе РП при этом будет 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 [68] 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |