
|
| |
|
Слаботочка Книги Чтобы обеспечить выполнение этого равенства прн любых значениях фу, используют РП с нелинейной статической характеристикой, определяемой выражением i7p. --K2/,. .6.f/r . (6-7) На рис. 6-5, а показан характер изменения основных координат системы в этом случае. На участке торможения относительные скорость и напряжение РП меняются по одинаковому линейному закону независимо от зна- Фактически в 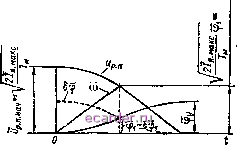 5j  чения Фу. реальной системе йр. большей части участка торможения будет превышать ю на некоторую величину, достаточную для того, чтобы PC, имеющий конечный коэффициент усиления, был ограничен, что обеспечивает линейный закон изменения скорости. Нелинейная статическая характеристика РЯ, построенная в соответствии с (6-7) и с учетом того, что йвх,р.п = 6ф, показана на рис. 6-5, 6 (кривая /). При Wp.p.n--O коэффициент усиления РП теоретически должен становиться бесконечно большим. Благодаря этому попытка использования расчетной характеристики приводила бы к неустойчивости системы в согласованном положении. Чтобы избежать этого, начальный участок характеристики делают линейным (прямая Оба) и соответствующим коэффициенту усиления при настройке контура положения иа оптимум по модулю (см. 6-1). В результате получается характеристика 2 с изломом в точке а при входном напряжении РП Ив .р,п = Vi. Реальные условия рьботы системы отличаются от рассмотренных идеализированных, с одной стороны, наличием момента статических сопротивлений, а с другой - тем, что в результате ограниченного быстродействия контура тока и конечного коэффициента усиления PC изменение якорного тока от + ДО -я.мчкс происходит пб мгновбино (как это пока- зано на рис. 6-4, а), а в течение некоторого времени. Чтобы избежать при этом перерегулирования по положению, нужно начи-иать торможение раньше, чем в идеализированном случае. С учетом этого предлагается сочетание линейной и нелинейной части характеристики производить в точке 6 при Йвя.р.п = = 0,5£i, Рнс 6 5 а нелинейную часть характеристики опустить на величину Шр относительно кривой 2 (характеристика 3). Нелинейная характеристика реализуется путем включения соответствующего нелинейного звена в цепь обратной связн РП. 6-3. СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ МЕХАНИЗМА В РЕЖИМЕ СЛЕЖЕНИЯ 6-3-1. ЗАДАЧА СЛЕДЯЩЕГО УПРАВЛЕНИЯ. ОШИБКИ ПРИ ОТРАБОТКЕ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ Задачей следящего управленпя является обеспечение перемещения ИО в соответствии с изменяющимся по произвольному закону управляющим воздействием при ошибке, не превышающей допустимого значения во всех режимах в условиях действия на систему возмущений [53]. В следящем режиме нн один из регуляторов не должен ограничиваться. Обычно полная количественная оценка точности следящей системы может быть произведена в результате рассмотрения ее работы в условиях совместного влияния управляющего и возмущающих воздействий, причем возмущающие воздействия часто имеют случайный характер. Однако, рассматривая принципы построения, позволяющие повысить точность системы, целесообразно разделить ее реакцию на управляющее воздействие в условиях отсутствия возмущений и на основное возмущение. Обычно точность следящей системы при управлении оценивают по точности воспроизведения входного сигнала, меняющегося с постоянной скоростью, с постоянным ускорением илн по гармоническому закону. Поскольку контур положения (см. рнс. 6-3) содержит интегрирующее звено, при пропорциональном РП система обладает астатизмом первого порядка по управлению. Это означает, что заданное ступенчатое перемещение система, настроенная на оптимум по модулю в контуре положения, будет отрабатывать без установившейся ошибки. Если в системе применен ПИ-регулятор положения и контур положения настроен, например, иа симметричный оптимум, то без ошибки будет отрабатываться не только постоянное перемещение, но и лннейно-изменяющийся входной сигнал. Астатизм третьего порядка, когда без ошибки отрабатывается и входной сигнал, меняющийся с постоянным ускорением, принципиально может быть достигнут применением РП с низкочастотной частью ЛАЧХ, имеющей наклон -40 дБ/дек,-Однако в этом случае фаза разомкнутой системы в области низких частот равна -270° и возникают трудности связанные с обеспечением достаточного запаса устойчивости. Обычно, исходя из требований к конкретной следящей системе, проектировщику задаются необходимые зиачеиня добротности системы по скорости н ускорению и Dg, характеризующие соответственно ошибки прн отработке лииейно-изменяющегося входного сигнала в системе с астатизмом первого порядка н сигнала, меняющегося с постоянным ускорением в системе с астатизмом второго порядка. Если порядок астатизма равен единице, то передаточная функция разомкнутой системы может быть записана в общем виде как J femP + --- + &iP+ 1 2 2 2 2 I (1 1 ll Добротность по скорости представляет собой величину Заданному значению D будет удовлетворять система, низкочастотная асимптота ЛАЧХ которой, имеющая наклон -20 дБ/дек, пересечется с осью абсцисс при частоте, равной D. В системе с астатизмом второго порядка, где ip)-in;--г +-+ + добротность по ускорению Низкочастотная асимптота соответствующей ЛАЧХ имеет наклон -40 дБ/дек и пересекает ось абсцисс при частоте, равной VDp. В практике имеют распространение следящие системы с астатизмом первого порядка, ЛАЧХ которых в некотором диапазоне частот левее частоты среза имеют участок с наклоном -40 дБ/дек. Такой характеристикой будет обладать, например, система, в которой в качестве регулятора положения используется ЯЯ-регулятор с ограниченным коэффициентом усиления в статике. В такой системе добротность по скорости по-прежнему определяется частотой пересечения низкочастотной аси.мптоты с осью абсцисс. Частота, при которой ось абсцисс пересекается частью ЛАЧХ - продолжением низкочастотного участка с наклоном -40 дБ/дек, лишь приближенно характеризует добротность по ускорению. Однако уже при протяженности этого участка порядка одной декады можно приближенно считать, что эта частота равна УО. Ошибка системы при отработке гармонического сигнала ср = = %т sin Qaj. t в линейной следящей системе также легко определяется на основании ЛАЧХ разомкнутой системы. Поскольку амплитудная частотная характеристика при каждой данной частоте представляет собой отношение а.чплнтуд гармонических сигналов на выходе и входе системы, можно записать 20 Ig 1 Ч- W где 6ф - амплитуда ошибки, также меняющейся по гармоническому закону с частотой иакс 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 [69] 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |