
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 [7] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 Это значит, что Го >Тр и в ЛАЧХ разомкнутого контура появляется участок с наклоном -40 дБ/дск (рис, 1-10, б). Переходный процесс при малом скачке Дйу будет иметь большее перерегулирование, чем при настройке па ОМ. В точке В, при Йо. t= йо. с. м1ш, постоянная времени становится меньше базовой, а коэффициент неизменяемой части оказывается равным Ад = 5= 1/о.с.иакс< ! В результате в асимптотической ЛАЧХ разомкнутого контура появляется участок с нулевым наклоном (рис. 1-10, в), а лереходныя процесс оказывается более медленным и плавным, чем при ОМ. 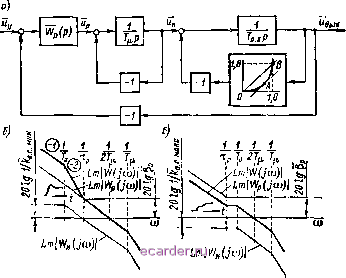 Рис. 1-10 Для того чтобы во всем диапазоне работпх режимов частотные характеристики контура оставались неизменными, необходимо в зависимости от режима изменять н Pp. и Тр, т. е. использовать принцип адаптации. 1-3-3. ОДНОКОНТУРНАЯ СИСТЕМА. ПОНИЖЕНИЕ РАСЧЕТНОГО ПОРЯДКА СИСТЕМЫ В электроприводе конкретного механизма из многих координат (напряжение преобразователя, ток двигателя, егомомеити скорость, скорость или перемещение О и др.) обычно одна является основной регулируемой координатой, по которой осуществляется главная обратная связь. Силовая часть электропривода и управляющая часть в виде регулятора, на входе которого сравниваются предписанное и истинное значения регулируемой переменной, образуют контур регулирования одноконтурной системы. При использовании тиристорных или других быстродействующих преобразователей структура силовой части электропривода оказывается достаточно простой, что позволяет осуществить коррекцию контура в соответствии с изложенными выше принципами, хотя он может содержать и большее число инерционных звеньев, чем контуры, рассмотренные в п. 1-3-1. На рнс. 1-11, а представлен контур, содержаш,1ш три апериодп-ческих звена н регулятор. Обратная связь по-прежиему вынолнена с передаточным коэффициентом k.c - Существует возможность, применив Я Д-регулятор, осуществить настройку, например, на ОМ, -It- 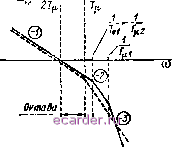 Рис. MI исключив тем сашм влияние Т и Т на внд переходного процесса по управлению. Однако по тем или иным причинам может оказаться целесообразным компенсировать лишь одну, ббльшую из этих постоянных времени, например Т.- Тогда вторую из них от-иосяг к числу малых постоянных времени Г = Тг н для настройки контура на ОМ применяют -регулятор с параметрами, выбранными в соответствии с (1-10) при = Т., kikos, = Tjn + То = / ill Г Ti. Постоянную времени T называют в.этом случае суммарной малой постоянной времени. После подстановки в передаточную функцию разомкнутого контура \V{p) = w,{p)WM. где передаточная функция неизменяемой части есть выражения для передаточной функции регулятора (1-9) при tp = r о2> получится Вид соответствующей асимптотической ЛАЧХ показан сплошной линией иа рис. Ы1, б. Там же для сравнения приведена ЛАЧХ контура второго порядка, настроенного на OiM, при наличии одно!! малой постоянной времени, равной Г. Видно, что при расчете параметров регулятора замена нескольких малых постоянных времени их суммой приводит к выбору такого быстродействия контура, при котором частота, соответствующая большей нз малых постоянных времени (например, I/rs - I/7c,2) располагается более чем на октаву вправо от частоты среза ср. Это обеспечивает в рассматриваемом контуре третьего порядка переходные процессы, близкие к процессам в контуре второго порядка, настроенном на 0А\ при малой постоянной времени, равной Т,. Изложенный подход может быть распростраиеи п на контуры с ббльшим числом постоянных времени, В этом случае пз нх числа выбирают одну (или две, если применяется ЯЙЛ-регулятор), наибольшую, влияние которой на переходный процесс стремятся исключить. Для определения параметров регулятора остальные постоянные Ti, Tji, 7),а, ... складывают и в приведенные выше формулы подставляют Поскольку соответствующий выбор параметров регулятора обеспечивает частоту среза разомкнутого контура, равную 1/(27), погрешность от упрощения вида ЛАЧХ в области верхних частот сказывается небольшой. Звенья с малыми постоянными времени могут располагаться не только в прямом канале, но и в канале обратной связи. Разработаны формулы настроек, обеспечивающее в этом случае наибольшее приближение переходного процесса на выходе контура к стандартному [13]. Однако, как правило, запаздывание в цепи обратной связи невелико, так как определяется лишь фильтрами на выходе датчиков регулируемых переменных. В это,м случае разница между характером изменения самой регулируемой величины и выходаого напряжения датчика незначительна. Из сказанного следует еще один важный вывод. В составе контура может быть элемент с передаточной функцией высокого порядка Wi (р), производить компенсацию запаздывания которого признано нецелесообразным. Примером может служить измерительный элемент (датчик), который в определенной полосе частот имеет постоянный коэффициент усиления, а при больших частотах входного сигнала - круто падающую амплитудно-частотную характеристику. Настраивая контур, содержашлй такой элемент, надо выбрать частоту среза так, чтобы падающая часть его амплитудной Характеристикп лежала правее частоты среза ЛАЧХ разомкнутого 1 2 3 4 5 6 [7] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |