
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 [71] 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 а замкнутого (6-16) После подстановки выражений для ftp с, Ар п н {р) в фсф-мулы для (р) И Гб (р) получается Лр) = (4W{V- ЛАЧХ эквивалентной разомкнутой системы Lm (jo) \ приведена на рис. 6-7, а (кривая /). Низкочастотная асимптота идег под наклоном -60 дБ/дек, что соответствует астатизму третьего порядка по управляющему воздействию, прн котором отсутствуют ошибки по углу, скорости и ускорению. Последнее подтверждается и выражением для 6ф, где отсутствуют составляющие ошибки, пропорциональные входному воздействию и 1-й и 2-й производным от него. Быстродействие по управлению характеризуется частотой среза 1/ (2Гц/). 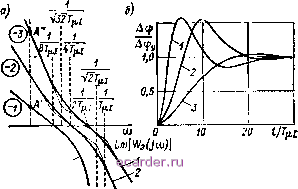 Lm\W(jui)l Рис. б 7 В отличие от системы, где порядок астатизма, равный трем, мог бы быть обеспечен за счет РП с наклоном низкочастотной части ЛАЧХ -40 дБ/дек, устойчивость системы с комбинированным управлением определяется передаточной функцией Соответствующая ей ЛАЧХ Lm 1 (/а>) имеет частоту среза = 1/(8Гц/), котораи определяет быстродействие системы без компенсирующего канала. Однако повышение быстродействия по управлению за счет комбинированного управления при неполной инвариантности сопровождается увеличением колебательности. Так, в рассматриваемом случае перерегулирование при отработке сту-пенчагого управляющего воздействия {кривая / па рис. 6-7, б) составляет около 55 %, в то время как прн отсутствии компенсирующего сигнала переходный процесс соответствует настройке на ОМ (кривая 3) и перерегулирование составляет около 4 %. Введение компенсирующего канала значительно повысило точность отрабочки системой гармонического входного сигнала. Еслн, например, входной сигнал имеет частоту Q,.gc = 0,05/7;, то ошибка уменьшится примерно в 50 раз (точки А и А на рис. 6-7, а). Реалшация двух производных от входного сигнала без замедления представляет известные технические трудности. Учитывая это. целесообразно оценить эффект, который может быть получен в рассматриваемой системе в результате введения только одной производной от входного сигнала при WKi(p) = T,p. После подстановки в (6-10) этого выражения, а также значений W (р) = W, (р) /р - 1/ {4Г ,р (2ГДр + 2TjP -f- 1) + Up] н W (р) = k при fep.n = 1/ (8Ги/) ошибка получается в виде б47-; р+в4ГР + 32Г;Р+8Г,(1-т,)р 8r.;Pf47,U(2\fP + 27,;P+l)+]+ Введение одной производной позвачяет исключить скоростную составляющую ошибки, обеспечив свойства системы с астатизюм второго порядка по управлению. На основании (6-9) прн Ti = 1c передаточная функция эквивалентной разомкнутой системы может быть получена в виде iP) = Z2Tlip(lTl,p + 2T,p-rl) Соответствующая ЛАЧХ Lm } W (/со) приведена на рис. 6-7, а (кривая 2), а реакция системы на скачок управления - иа рнс. 6-7, б (кривая 2). При рассмотрении вопроса об улучшении качества отработки системой управляющего воздействия использовалось упрощенное 01шсание внутренних контуров. Так же, как и при рассмотрении систем подчиненного регулирования без компенсационного канала, уточнение этого описания скажется в области верхних частот, где характеристики эквивалентной системы будут иметь больший наклон, чем показано на рис. 6-7, а. 6-3-3. ДВУХКАНАЛЬНЫЕ СЛЕДЯЩИЕ ЭЛЕКТРОПРИВОДЫ Одним из способш повышения точности отработки управляющего воздействия является применение так называемых двухканадьных следящих приводов (42]. Идея двучканалыюго привода поясняется структурной схемой рнс. 6-8, а. На два канала, передаточные функции которых в разомкнутом гостояннн обозна- ченьг (р) и (р), подаются два управляющих воздействля tpj и фц. Канал с передаточной функцией (р) замкнут по собственной выходной координате Ф. Канал с передаточной функцией Wj, (р) замкнут по выходной воорди-г-ате системы, являющейся суммой координат и фц. Управляющее воздействие является основным и должно точно отрабатываться. Воздействие (Pj,j может вырабатываться программным устройством и явтяется приближенным {прогнозированным) значением зада!;пого перемещения. При этом первый канал ocjriuecTBifer i рубое, а второй-точное >правлсние перемещением. 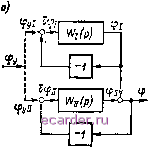
Рис. 6-8 Часто для обоих каналов используют общее управтяющее воздействие фу = = Фу[ = Фуп- Оценим для этого случая возчожности даухканального привода, предполагая, что оба канала обладают астатшмои первою порядка и настроены на 0Л1. За.ченяя в первом приближении реальные передаточные функции упрощенными, можно записать Передаточная фрикция замкнутой системы имеет вид Дф(р) W[(p)-MF,[(p) + Wf(p)H?],(p) а эквиЕа.чентной разомкнутой - [l + W,(p)l[l-l-Wf (P)l fp)--W,f{p)+Wf,(p)ll,(p). После подстановки сюда выражений для Wf (р) и W {р) поучается L rfu + niu)P + 2(lu + nu)P+ W,(p) = (6-18) Очевидно, что реальный вид переходного процесса по управлению зав11сит от соотнощення малых постоянных времени в первом и втором каналах Г,ц и 7*1] д. Из рис. 6-8,0 видно, чго величина ф, воспроизводит управляющее вэздей- , сгвие с точностью, определяемой передаточной функцией 1, (р), т. е. малой постоянной времени 7 j. На входе звена с передаточно; функцией (р) действует сигнал 6ф,[ = ~ Ф1 ~ Фц - ~ Фп Следо.ательно, если бы второй канал обладал абсолютным быстродействием и ощибка бф равнялась пулю, ТО выходная величина звена Wii (р) равнялась бы ошибке первого канала и истин- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 [71] 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |