
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 [74] 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 6-4, ВЛИЯНИЕ НЕКОТОРЫХ ОСОБЕННОСТЕЙ МЕХАНК.ЗМА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА 6-4-1. СУХОЕ ТРЕНИЕ И КОМПЕНСАЦИЯ ЕГО ВЛИЯНИЯ На работу следящих электроприводов значительное влияние оказывают сухое трение и зазоры в кинематических цепях механизма. Это объясняется тем, что следящий электропривод - электропривод реверсивный, работающий со знакопеременной нагрузкой, а также тем, что работа на низких скоростях является его рабочим режимом. Кроме момента вязкого трения, учтенного на рис. 4-2 и 4-3 обратными связями, охватывающими звенья с передаточными функциями (/(Т.гР). l/rgp, в электроприводах обычно существует составляющая момента треиия м.т = -/Й,.resign (о, направленная против движения и остающаяся примерно постоянной прн скорости, отличной от нуля. Прн скорти, равн ой нулю, она может принимать любое значение между М и -Mf,: Эту составляющую называют моментом сухого трения. На структурной схеме рис. 6-3 момент сухого трения учитывается нелинейным блоком с релейной характеристикой, показанным штриховыми линиями. При скорости двигателя, не равной нулю, на его выходе существует момент Яс.то Р* неподвижном двигателе любой приложенный к механизму момент двигателя Мд i Ic.io I уравновешивается моментом на выходе нелинейного блока.* Следствием наличия сухого трення являются синжеиие точности слежения, увеличение длительности переходных процессов при согласовании и зависимость их характера от значения рас--согласования, а в определенных случаях и возникновение автоколебаний в системе. Качественное предсгавленне о характере этих явлений дает рис. 6-П. На осциллограмме рис. 6 II, а показаны вызванные сухим трепием автокотебанпя в системе с /7/-регулятороы положения. Во время, непосредственно предшествующее моменту времени t, момент, развеваемый двигателем (ток tJ, меньше момента сухого трения .VIc.-ro и двигатель неподвижен, (ш - 0). Однако рассогласование б(р при этом не равно нулю (20 в частном случае на приведенной осциллограмме). Под действием этого рассогласования напряжения р. на выходе РП (рис. 6-3) и Up, с на выходе PC меняются. Это приводит к изменению тока якоря. В момент времени он достигает значения, соответствующего мо-. менту сухого трения и затем превышает его. Двигатель начинает вращаться. В момент Времени рассогласование становится равным нулю, но скорость двигателя и ток отличны от нуля. Когда знак рассогласования менйе1ся, двигатель начинает тормозиться и останавливается в момент времени f когда ток станет меньше значения, соответствующего моменту Мс.ю- Далее процесс повторяется при другом знаке скорости. В системе сущесгвуют устойчивые авго-колеиания. На рис. 6-11,6 показан процесс согласования (начальное рассогласование составляет 30 ) в системе с сухим 1рением, в которой устойчивые автоколебания не возникают. В течение вра.1ени ti - 2, когда момент, развиваемый двигателем, меньше момента сухого трения, двигатель неподвижен и сохраняется угловая ошибка. Эго приводит к удлинению процесса согласования. При другом зна-qeHHH начального рассоглассшания вид пере.ходного процесса был бы другим. 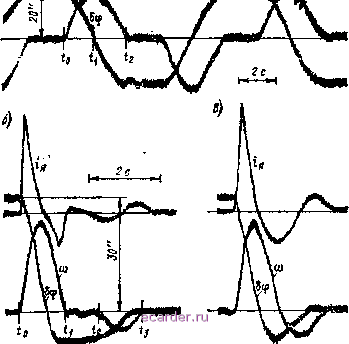 Рис. 6-11 Если зиаченне Л1с.тв достаточно стабильно, существенное снижение влияния сухого трения может быть получено при нсполь-зоваини специального компенсирующего канала. Теоретически полная компенсация сухого трения могла бы быть достигнута, если на вход звена 1 / (Тмр) (см. рис. 6-3) была дополнительно введена такая же нелинейная связь по скорости о), как н показанная на рис. 6-3 штриховыми линиями, но положительная. Если предположить, что контур тока обладает высоким быстродействием, т. е. {р)\, то эта связь может быть перенесена на его вход, ЧтоСы избежать наличия положительной обратной связи, можно, пренебрегая ошибкой в контуре скорости, заменить обратную связь прямым каналом с нелинейным блоком, входным сигналом для которого является сигнал задания скорости, т. е. напряжение йрп. Полученная в результате приведенных рассуждений 8 Л. в, Башзрпк 225 схема показана на рис. 6-12. Появление на выходе РП любого напряжения сразу приводит к подаче на вход контура тока сиг-нала, обеспечивающего создание двигателем момента, равного Мс.то. При переходе йр.д через нуль и изменении его пааярности момент двнгателя изменяется на 2Мсло. Процесс согласования после введения компенсирующего канала, практически совпадающий с процессом в линейной агстеме, показан на рис. 6-11, е. 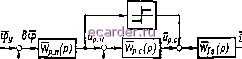 7.Г Рис. 6-12 Положительный эффект от введения рассмотренного канала может быть достигнут и при неполной компенсации сухого трения, что существенно, так как обычно значение Л1.то нельзя считать идеально стабильным. 6-4-2. ЭЛЕКТРОМЕХАНИЧЕСКАЯ ВЫБОРКА ЗАЗОРА В СЛЕДЯЩЕМ ЭЛЕКТРОПРИВОДЕ Зазор в кинематической цепи, связывающей двигатель с ИО, существует в результате неточности обработки шестерен редукторов, неплотного соединения полу.муфт, соединительных муфт и др. В результате прн определенных условиях зазор может раскрываться , т. е. может создаваться положение, при котором валы двигателя н механизма оказываются не связанными друг с другом. Структурная схема силовой части электропривода с упругостью и зазором представлена на рис. 4-3. Наличие зазора приводит к тому, что в определенные моменты времени, когда разность угловых положений двигателя и ИО - Фа оказывается меньше за- зора фо, контур, замкнутый по положению фз = щ/р исполнительного органа, размыкается и скорость двигателя изменяется, не приводя к изменению углового положения ИО, которое может вызвать появление устойчивых автоколебаний. Качественно процесс автоколебаний в двухмассовой системе вокруг положения равновесия Gi = Щ ~ О при Л Я-регуляторе положения иллюстрирует рис. 6-13. В период, предшествующий моменту времени t, ИО неподвижен = 0). Однако под действием 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 [74] 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |