
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 [75] 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 выходного напряжения РП, которое меняется вследствие того, что д, 7- О, скорость двигателя ci)i меняется при отсутствии связи двигателя с механизмом. В момент времени зазор выбран, и далее двигатель вращается вместе с механизмом. Угол Фз изменяется. Но в момент времени скорость двигателя становится равной нулю, а затем меняет знак, вследствие чего двигатель и механизм снова разъединяются до момента времени когда зазор окажется пройденным в противоположном предыдущему направлении. Этот процесс периодически повторяется. 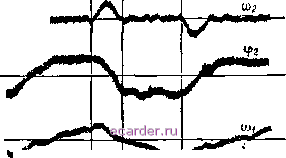 Рис. 6-13 Одним из способов устранения зазора является нспользованне специальных способов его выборки. Электромеханические способы устранения нлн уменьшения влияния зазора иа работу системы основаны на применении двух нлн большего числа двигателей, работаюшлх на один ИО. Так, на рис. 6-14, а с шестерней 2 через шестерни / и 5 и редукторы Рд1 н Рд2 связаны двигатели Mi и М2, питающиеся каждый от своего реверсивного ТП. Система управления электроприводом включает в себя раздельные токовые контуры с регуляторами тока РТ1 и РТ2, общий контур скорости, замкнутый по полусумме скоростей двигателей, н обшд1Й коитур положения (на рисунке не показан). Предполагается, что на О действует активный момент нагрузки М, который может менять знак независимо от направления вращения. Зазор, существующий в кинематической цепи (на рнс. 6-14, а условно показано, что он сосредоточен в зацеплении шестерен 1 а 3 с Шестерней 2), должен быть всегда выбран, т. е. как прн изменении скорости, так н при изменении момента нагрузки зубья шестерен кинематической цепи не должны выходить нз зацепления друг с другом. Работа семы в статике может быть описана на основе статической характеристики, показывающей, как зависят моменты дви- гателей Л4д1 и Мдз от момента нагрузки (рис. 6-14, б). любом установнвн]е\1Ся режиме один из двигателей создает двигательный, а другой - тормозной момент, в результате чего создается распор н зазор в кинематической цепи оказывается выбранным. Суммарный развиваемый двигателями момент равен моменту нагрузки. шР1] 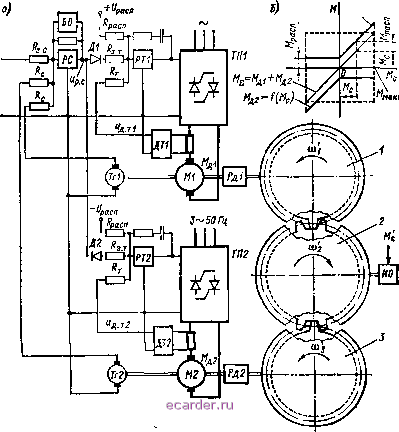 Рис. 6-14 Предположим, что шестерня 2, соединенная с ИО, вращается в показанном на рисунке направлении и момент нагрузки препятствует вращению. Двигатель Ml работает в двигательном, а М2 - в тормозном режиме, причем Mji = + Мр , Л1дг = -Mpcn. где Л1с - приведенный к двигателю момент нагрузки, Alpan ~ момент распора. Еслн знак момента нагрузки изменится, то Лс будет способствовать вращению ИО и, чтобы сохранить прежнюю скорость, система регулирования увеличит тормозной момент, развиваемый двигателем М2. Двигатель Ml будет создавать мо- мент, равный Мр , за счет чего будет обеспечено прижатие зубьев шестерни / к зубьям шестерни 2. Пусть теперь прн первоначальном знаке М. изменится направ-ленпе вращения. Момент нагрузки, который препятствовал вращению, начнет содействовать ему. Знаки моментов, развиваемых двигателями, не поменяются, но при изменившемся знаке скорости двигатель АН будет работать в тормозном, а М2 - в двигательном режиме. Описанные характеристики распора могут быть реализованы за счет включения диодов Д1 и Д2 во входные цепн регуляторов тока РТ1 и РТ2 и подачи на входы последних напряжений распора i/pacn разного знака, задаюищх в двигателях токн одинакового значения и разного направления. Поскольку в системе подчиненного регулирования напряжение на выходе PC является эталонным дли контура тока, а ток якор1ь каждого двигателя, как следует из характеристики рис. 6-14, 6, не должен менять направление, диоды Д1 и Д2 пропускают на входы контуров тока напряжение PC лишь одного определенного для каждого двигателя знака. Так как одни из диодов всегда закрыт, значение тока cooi-ветствующего двигателя задается только напряжением f/pn- В рассмотренном исходном режиме, когда диод Д1 открыт, а Д2 закрыт, для входных цепей РТ можно записать Если значению момента Мра:п соответствует ток / .расп. а максимальному моменту нагрузки jMbkc - ток /л.яко то прн максимальном моменте напряжения датчиков тока буд>т: я. il ~ Д. т (я макс ~1 Ч. расп) я, i ~ Д. ся. расп* Напряжение распора должно быть выбрано в соответствии с выражением -ь а максимальное напряжение на выходе PC в установившемся режиме будет а -у 1 р. смаке - Д.т f н. иакс* Если на выходе РП появится приращение напряжения, направленное на резкое увеличение скоростн, то напряжение на выходе PC достигнет порога ограничения и ток двигателя, работающего в двигательном режиме, станет предельно допустимым, в то время как М2 будет продолжатьсоздаватьтормозной момент, равный Мрасп-При сигнале на торможение напряжение PC поменяет знак и достигнет отрицательного порога ограничении. Тогда тормозной ток М2 станет максимальным, а двигательный ток Ml будет ра- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 [75] 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |