
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 [76] 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 вен /, расп- Такнм образом, необходимый для ускорения и торможения электропривода момент будет всегда создаваться одним двигателем при неизменном токе второго. Очевидно, что приближение характеристик электропривода к линейным связано с завышением установленной мощности двигателей. Действительно, каждый из двух двигателей должен быть рассчитан на максимальный момент, равный Ммвкс 4 рэсп-Значение момента Мрасп принимают обычно равным (0,1-ь0,2) М акс. благодаря чему суммарная установленная монщость завышается в 2,2-2,4 раза. Не останавливаясь подробно на этом вопросе, отметим, что существуют и иные способы согласования характжстнк, позволяющиX уменьшить установленную мошлость двигателей. Однако это приводит к тому, что выборка зазора осуществляется не в полном диапазоне изменений момента нагрузки. 6-4-3. НАСТРОЙКА КОНТУРА ПОЛОЖЕНИЯ В СИСТЕМЕ С УПРУГОСТЬЮ При построении следящей системы в случае, когда упругостью связи между даигателем и ИО пренебречь нельчя, систему рис. 4-4 с выходньшн координатами A(5j и можно рассматривать как внутренний контур, на входе которого действует напряжение РП Дмр.г1= А у. Поскольку требуется обеспечить определенный характер перемещения механизма, стремятся располагать датчик положения на НО, благодаря чему сигнал обратной связи можно считать равным В отличие от жесткой системы, где при Гд, с = Ои при пропорциональном PC внутренний контур с учетом сделанных допущений описывается передаточной функцией (6-16), в упругой системе характеристики внутреннего коитура зависят от того, как при данном соотношении масс произведена настройка PC, применены ли рассмотренные в гл. 4 корректирующие цепи и т. д. На рис. 6-15 приведена линеаризованная структурная схема лостроениой по принципу подчиненного регулирования следящей системы управления лвумассовым упруговязким объектом без зазоров и су>ого трения (обрагная связь по производной от скорости исполнительной оси показана для частного случая). Передаточные функции (р) и (р) определяются выражениями (4-li). Пользуясь этой схемой, можно произвести выбор параметров РП, а также оценить возможность н целесообразность введения тех или иных корректирующих связей для уменьшения влияния упругости. 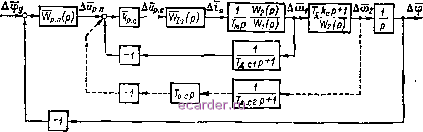 Рис. 6-15 Обычно, по условиям технологического процесса, скорость перемещений ИО невелика. При использовании серийных быстроходных двигателей это приводит к необходимости применять редукторы с высоким передаточным числом. Вслед- ствие этого приведенный к двигателю момент иаерцнн механизма часто оказывается меньше момента инерции двигателя и речуктора или соизмерим с ним н характерные для следящих систем значения коэффициента соотношения масс v лежат в пределе от единицы до нескольких единиц. В качестве примера может быть рассмотрена линейная следящая система с крайним значением т?=1. Для упрощения будем считать, что фильтры на тахо-генераторах OTCVTCTBytor: Гд с1 = л. = 0. При описании контура скорости токовый контур заменим апериодическим эвеном tTjgfp)- = \/ (Т fp 1). причем е рассматриваемом примере причем Tf = 0,2Ту. По-сколску коэффициент соотношения масс равен единице, то соблюдается равенство (р) = Га (р) и контур скорости может быть настроен так же, как в жесгкой системе. При принятых допущениях передаточная функция замкнутого контура скорости будет оп-реу1елева как ip) = =l/(2TJ+2rip-\- I).a ip) = уТу p + 22Гу рЛ-\ = Т§р- -Ь 2%Тур -f I. Следящая сискма npg пропорциональном РП описывается передаточной функцией 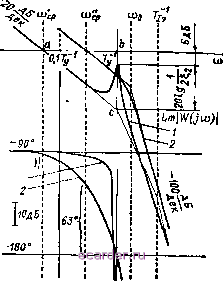 Рис. 6-16 р {Щ,Р-2Т,р+\){Тур + 2ЦТр + \) При частоте со = МТу соответствующая это передаточной функции фазо-частотная характеристика / (рис. 6-Ш) гтролодит ниже 180 . Поэтому, не применяя дополнительной коррекции, для обеспечения устойчивости приходится так выбрать Йц.р, чтобы резонансный всплеск ЛАЧХ разомкнутой системы располагался ниже оси абсцисс (амплитудная частотная характеристика / на рис. 6-16). Если считать, что расстояние до оси абсцисс должно составлять, как миничум, 6 дБ, то можно нз огнованин сравнения треугольника аЬс с подобным ему треугольником, один катет которого равен одной декаде, а второй - 20 дБ, записать (2082t+s)/( fr -)=- - Отсюда частота среза стсуящей системы определится как = \]/Ту, Пусть Ij = 0,05. Тогда 1 = Запас по фа:!е составляет при этом почти 90*. Порядок астатизма может быть увеличен за счет применения ЯЯ-регулягора положения при выборе V ч>(.5->2)/<йср. Бастродейстане следящей сясгемы может быть увеличено за счет введения обратной связи по производной ог скорости исполнигельной осн. Если соотношение между Г,=- 2Tj н Ту удовлетворяетуслоаию Т О.Ту, то и Та., могут быть выбраны по формулам (4-24). Примерный вяд характеристик разомкнутой системы в этом случае (кривые 2) показан на рис. 6-12. Вь[бор Лр. п производится из условия обеспечения требуемого запаса по фазе, обеспечивающего переходный процесс, близкий к соогветствугащечу при CTaii-дартной нястройке, например, на ОМ. При этом запас по фазе должен быть близок к 60°. Од будет обеспесен при частоте среза ЛАЧХ разомкнутой системы ©р, в несколько раз превышающей частоту среза wp, полученную при отсутствии обратной связи по производной от скорости. ГЛАВА СЕДЬМАЯ ПРОГРАММНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ 7-1. ОБЩИЕ СВЕДЕНИЯ О ПРОГРАММНОМ УПРАВЛЕНИИ 7-1-1. КЛАССИФИКАЦИЯ СИСТЕМ ПРОГРАММНОГО УПРАВЛЕНИЯ Автоматизация промьппленных установок, в частности металлорежущих станков со сложными законами движения ИО по координатам эффективно достигается при програм,том управлении. На первом этапе программного управления на основе геометрической и технологической информации, задаваемой в виде рабочего чертежа детали и технологической карты, производится подготовка исходных данных для программирования, которые сводятся в карту исходных данных (риг. 7-1, а). На втором этапе на основе этоГг карты ручнЕлм нли авгоматизированным способом осуществляется программирование, результатом которого является готовая программа в форме физической модели (копир), программного нулачка, копнрчертежа, в виде изменяющихся по заданному закону гоков и напряжений нли в числовом виде. Применение физических моделей в качестве программоносителей, хотя и обеспечивает высокую надежность системы управления при от]]оситель]ю простых схемных решениях, требует значительных затрат на изготовление копиров, ограничивает рабочие скорости ИО н, следовательно, снижает производительность установки в целом. Аналоговая программа в виде изменяющихся элекгрических величин применяется при автоматизации таких промышленных установок, для которых не требуется высокой точности по перемещению ИО. Ыаибачее эффективной по точности, производительности и простоте переналадки станков и машин является числовая программа. Это приве.10 к широкому применению систем числового программного управления (ЧПУ). На третьем этапе nporpasiMHoro управления система ЧПУ воспроизводит программу в форме требуемых перемещений ИО по координатам и выдачи необходимых технологических команд. Собственно система ЧПУ может быть разделена на вычисли гельно-логичЬ-ское устройство (ВЛУ) и автоматическую систе.чу упоавления электроприводом (АСУ ЗП). - W и По структуре, функциям и объему информации ВПУ все системы ЧПУ можно ра.зделигь иа две основные группы: системы, выпшиенные аппзратно и называемые сокращенно NC (Numerical Conlrol), и сисгемы со встроенньши м]1ни-ЗВМ, или микропроцессоры, называемые CNC (Computer Numerical Control). Сисгемы NC имеют жесткую структуру с определенными заданными функциями управления, и перестройка алгоритмов управления либо невозможна, либо может быть произведена на стадии изготовления. Оперативная памя№ этих систем ограниченна. Системы CMC обладают гибкой структурой с возмож- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 [76] 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |