
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 [79] 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 Таблица 7-t. Международный код IS0-7bit
После записи и контроля информации на перфоленте осуществляется вес-произведение цифровых данных и технологических команд перед поступлением их в устройства управлепия электроприводами и другими рабочими органами оборудования. Воспроизведение происходит последовательно по строкам во время Нротяжки ленты в воспроизводящем устройстве. В качестве воспроизводящих устройств применяются быстродействующие электромеханические и фотоэлектрические трансмиттеры. Скорость воспроизведения у фотоэлектрических трансмиттеров составляет 800 - 1500 строк/с. Старт-стопный электропривод лентопротяжного механизма выполняется с быстродей-*ующей электромагнитной муфтой, присоединяющей вал лентопротяжного Л1еханизма к валу электродвигателя и рзчъединяющей нх по командам с пульта и от программы. После заполнения всех запоминающих устройств, предусмотренных программой, информация сигналом опроса переносится в выходные устройства ВЛУ и в систему управления. Числовая информация на перемещение по координатам в Контурных системах ЧПУ поступает в интерполятор, в позиционных - в соответствующие координатные регистры, счетчики или сумматоры, а иифо]:ма- ция с технологическими командами - в дешифрирующие устройства и на органы управления обтектом. В контурных системах во время отработки одного кадра с ленты воспроизводится следующий кадр, чем обеспечивается непрерывность поступления информации управления, При этом новая информация поступаег 8 аналогичную схему второго комплекта запоминающих устройств. 7-2-3, ИНТЕРПОЛЯТОРЫ Как отмечалось, исходная программная информация определяет траекторию даиження ИО татько конечным числом опорных точек. Для осуществления формообразования в установках с контурными системами числового управления необходимо, чтобы в каждый момент времени было обеспечено согласованное движение ИО установки по двум или большему числу координат. Для этого инюрмация дачжна поступать в АСУ ЭП непрерывно и в соответствии с требуемым законом движения ИО по каждой координате. Эту задачу в системах ЧПУ выполняют интерполяторы. С выхода интерпатятора программная информация распределяется по управляемым координатам в унитарном коде, т, е. в виде последовательности импульсов, чнсло которых равно запрограммированному числу, введенному в кнтер-полятор в кодированном виде, а время, за которое выдаются эти импульсы, равно заданному времени обработки участка контура от одной опорной точки до другой. Задаваемая скоро:;ть движения ИО по координате в каждый момент времен)! будет пропорциональна частоте следования импульсов. Пусть надо воспроизвс-ти кривую второго порядка па плоскости ХОУ }22]. Дифференцируя по х общее уравнение кривой второго порядка Лх + 2Вху Су -!- 2Dx -2EyF=0t можно ПОЛЧИТЬ dx Bx-Cy-i-E или в параметрнческо ! форме ~ = ЩВх-Су + Е); =-а>(Ах-Ву-0), (7-2) где о) - число, знак которого определяет направление, а значение - скорость движе[;ия изображающей точки по траектории. После дифференцирования первого нз уравнений (7-2) по времени и определения координаты if и ее производной через х и dx/dt из исходных уравнений (7-1) и (7-2) получается днфференциальЕСое уравнение для координаты х -!- (ЛС - 3) (йх = (BE ~ CD) (й8. Его характеристическое уравнение - со-{В~ - АС) ~ О имеет корни Pi,2 = ± ю \В- АС - Если 3 <; АС, то корки характеристического уравнения мнимые, хну будут периодическими функциями времени, а полученная траектория у = f (х) будет замкнутой кривой эллиптического вида (а частном случае - окружностью). Структурно вычислительное устройство для воспроизведения функций х (i) н у {t) в этом случае будет представлять собой два последовательно включенных интегратора, охваченных отрицательной обратной связью. Если В= АС, то корнк характер не гичес кого уравнения - нулевые, кратные, а траектория будет представлять собой кривую параболического вида. Вычислительное устройство состоит из разомкнутой цепочки двух последовательно включенны.\ интеграторов. Если > АС, то корни характеристического уравнения - вещественные, равные по модулю и обратные по знаку, а траектория представляет собой кривую гипербочического вида. В этом случае дна последовательно включенных интегратора должны быть охвачены положительной обратной связью, По дифференциальным уравнениям (7-2) на рис, 7-4 построена общая схема воспронзнедсния кривых второго порядка. Она состоит из множи гельных устройств с сомножителями А, В, С, w, -(о, двух сумматоров Сл и Су и двух интеграторов. Множитсу1Ь В характеризует поворот осей рассматриваемых кривых относительно осей координат. Если оси кривых параллелыш осям координат, то в = о. Рис. 7-4 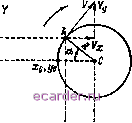 Рис. 7-5 Рассмотрим частные случаи построения схем вычислительных устройств для воспроизведения отрезков прямых и дуг окружности, Уравнение прямой в дифференциальной форме имеет вид или в параметрической фор.че dx dt dy dx =юДх; (7 3) где Дг=д-,(-Ха, = Ук-Уо - приращения координат для рассматриваемого отрезка прямой; ц, у - координаты начальной точки прямой; х, у - координаты конечной точки. Если Vпостояннан скорость движения изображающей точки по прямой, а 1=У {.е.~Ха)~\-{у - уц)- длина отрезка прямой, то параметр (й в данном случае равен (а = VII Д кд-время отработки кадра, т. е, время отработки элемента программы, соответствующего перемещению на участке интерполяции. В основе вычислительного устройства воспроизведения прямой по уравнениям (7-3) лежат два самостоятельных интегратора, не охваченные обратными связями. Из уравнений окружности (х - Хц. о) Л- {у - Ул. о) = после дифференцирования по x получается dy д: - ли. о и в параметрическом виде dx , . (7-4) Дв %о 1/ц.о - координаты центра окружности. Очевкд1:о, что уравнение окружности является частным случаем общего уравнения кривых второго порядка, когда А= С ~ \\В ~ Q\D = -Xu.o; = -ц.о. а с Уа. о - Р- выяснения физического смысла параметра сэ для окружности обратимся к рис. 7-5, из которого следует (afx/dO = Vx= V %тх; {dyfdt) =: Vy= lcosaj где Ух и - составляющие скорости по координа- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 [79] 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||