
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 [8] 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 контура. С этой точки зрения при выборе параметров регулятора можно заменить звено высокого порядка эквивалентным апериодическим с передаточной функцией kailiTp + 1), выбрав постоянную времени Ti так, чтобы низкочастотная часть фазовой характеристики реального звена наилучшим образом совпадала с низкочастотной частью фазовой характеристики эквивалентного (рис. 1-12). Вследствие того, что в области частоты среза характеристики контура мало отличаются от характеристик контура, настроенного на ОМ, переходные процессы в нем будут близки к показанным на рис. 1-7, Если таких элементов в контуре несколько, то для расчета параметров регулятора каждый из них можно заменить эквивалентным апериодическим звеном н оперировать с суммарной малой постоянной времени, в которую постоянные времени этих звеньев войдут в качестве слагаемых. 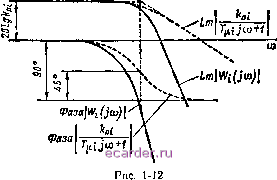 Конечно, замена малых постоянных времени их суммой может производиться и при расчете параметров регулятора в контуре, настраиваемом на СО. 1-3-4. ОГРАНИЧЕНИЕ ПРОМЕЖУТОЧНЫХ КООРДИНАТ. ПРИНЦИП ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ В Процессе управления электроприводом регулируемая координата должна наилучшим образом воспроизводить изменения предписанного значения. Однако при этом часто оказывается необходимым ограничить пределы изменений одной нли нескольких npoNfe-жуточных координат (например, ток двигателя, его скорость при отработке перемещения и т. п.). С этой целью одноконтурная система дополняется обратными связями по этим координатам, вступающими в работу, когда контролируел1ая координата стремится превысить предельно допустимое значение. На рис. 1-13, а показана такая связь, предназначенная для ограничения т! в системе с объектом в виде апериодического н интегрирующего звеньев. Во всех режимах, когда h ,i< Corp. система работает как одаюкоитурная. При Uguxx > огр дополнительная обратная связь замыкается. Если предположить, что ее передаточный коэффиниеит, определяемый наклоном рабочей части нелинейной характеристики, настолько велик, что действием главной обратной связи можно пренебречь по сравнению с действием дополнительной связи, система перейдет в режим, когда входной сигнал Ну будет определять значение Нвых1- Недостатком такого 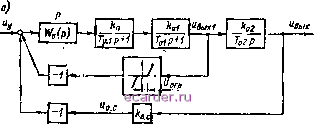 4i(p} 8ЫХ. To-tpfl 4ox1 Рис. 1-13 способа ограничения является то, что при регзляторе PJ с передаточной функцией (jo), выбранной из условия настройки одноконтурной системы, должна обеспечиваться удовлетворительная дниамнка и прн действии обеих обратных связей. Это приводит обычно к неооходимости уменьшить коэффициент передачи допол- нительной обратной связи, что сопровождается ухудшением каче-сгва ограничения промежуточной переменной. Иногда применяется схема с независимым регулированием координат (рис, 1-13, б). Когда промежуточная переменная вы-ч стремится превысить предельно допустимое значение, логическое переключающее устройство (ЛПУ) переключает ключ К- Контур регулирования выходной переменной iij,, размыкается, а контур регулирования вых1 с регулятором Р2 замыкается. Система переходит в режим поддержания постоянства промежуточной координаты, значение которой будет определяться значением входного сигнала (/ор. В качестве величины, на которую реагирует ЛЛУ (на схеме ие показано), может использоваться разность Uy - u Когда в переходном процессе она уменьшится до определенного значения, ЛЛУ снова замкнет главный контур, разомкнув контур регулирования промежуточной координаты. Поскольку оба контура никогда не работают совместно, передаточные функции регуляторов (р) и (р) могут быть выбраны из условия оптимальной настройки соответствующих контуров. Недостатком схемы является ее усложнение за счет введетия ЛПУ. Это особенно ощутимо, если ограничение должно быть наложено на несколько промежуточных координат. Наибольшее распространение имеют в настоящее время системы, построенные по принципу подчиненного регулирования, который поясняется рис. 1-13, в. В системе предусмотрены два контура регулирования со своими регуляторами PI н Р2, причем выходное напряжение регулятора внешнего контура является предписанным значением для внутреннего контура. Выходное напряжение регулятора Р2 ограничено предельным значением б/рзогр- Поскольку Ирых1 задается выходньш напряжением Р2, оно ие может превысить значения t/p2orp- Применяя в рассматриваемой схеме ЯЯ-регулятор, можно реализовать стандартную настройку внутреннего контура, быстродействие которого будет определяться его малой постоянной времени Тщ. При настройке на ОМ передаточная функция замкнутого контура в соответствии с (1-7) получится в виде 2Т1,р+2Тр-\ В контуре может быть не одна, а несколько малых постоянных времени. Тогда T будет представлять собой суммарную малую постоянную времени контура, а приведенная передаточная функция (р) будет описывать замкнутый контур приближенно. Передаточную функцию н2(р)Гхз(р)<.2 можно теперь рассматривать как передаточную функц[1Ю неизменяемой части нового, внешнего контура, замкнутого через собствен- 1 2 3 4 5 6 7 [8] 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |