
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 [81] 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 вает единицу со счетчика СчХ. В результате новое значение оценочной функции в соответствии с рассматриваемым алгоритмом будет равно щ,, = UQ,a + 2хц -]- I. Согласно рис, 7-7 это число будет положительным, Спедовагельно, следующий, агорой импульс будет послан по оси К. При его прохождении вычтется удвоенное значение числа регистра РгУ из содержимого сумматора, уменьшится на единицу содержимое регистра PeY, прибавится единица в сумматор и спишется единица со счетчика ChY. Оценочная функция прн этом примет значение = .(f, -2(/н + 1 = оо + 2*н + 2ун + 2, Дальнейшее распределение импульсов яо координатам будет зависеть от знака текущего значения оценочной функции у- Такой режим работы интерполятора будет продшгжаться до полной отработки чисел, внесенных в Ha4avTe цикла в счетчики СчХ и ChY. В линейно-круговом интерполяторе, работающем по алгоритму оценочной функции, неравномерность в распределении импульсов во времени и по координатам не приводи г к повышению погрешности программирования от дискретности программы, так как минимальная пачка импульсов, расположенная в промежутке между импульсами второй координаты, всегда будет состоять только из одного импульса. Поэтому погрешность от дискретности не будет превышать цены импульса. Текущая программируемая контурная скорость, определяемая как геометрическая сумма координатных скоростей на элементарных участках фактической траектории, ограниченной двумя смежными взаимно перпендикулярными отрезками, не остается постоянной при постоянной частоте следоваиня входных импульсов /и - const и зависит от утла наклона прямой илн касательной к дуге н рассматриваемой точке. При движении, не совпадаюп1.ем с направлением координатных осей, программируемая контурная скорость равна V=fah У 1 -а/(1 + -[-и), где а - число импульсов, следующих друг за другом по одной координате; к - цена импульса, мм. Максимальное значение скорости будет при движении вдоль одной из координатных осей (Кякс ~ /о). минимальное - на участках траектории, где наклон касательной к координатным осям образует углы, кратные 45° {Vna=-~foh Таким образом, колебания скорости могут составлять до 30 % от установленной, что не всегда допустимо. Снижение откчонення контурной скорости достигается автоматической корректней входной частоты. 7-Э. ПРОГРАММНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ШАГОВЫМИ ДВИГАТЕЛЯМИ 7-3-1. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ В системах ЧПУ шаговые двигатели (ШД) применяются и как двигатели, обеспечивающие перемещение ИО по координатам,и как преобразователи импульсной информации в угол поворота задатчика программы для силовых следящих электро- нлн гидроприводов. По принципу действия ШД представляет собой дискретный синхронный двигатель, ротор которого поворачивается дискретно после каждого импульса на входе системы управления и остается неподвижным, когда импульсы не поступают. В сист-емах ЧПУ наибольшее при.менение нашли индукторные ШД. Ротор индукторного ШД (рис. 7-9) имеет зубцовую структуру. Зубцами с таким же шагом снабжены полЕОСЫ статора. Шаг и число зубцов на роторе н полюсах статора вы-бираюгся так, чтобы между зубцами ротора и зубцами патюса, который в данный момент не возбужден, существовал сдвиг на 1/3 зубцового шага. Обмотки каждой пары противолежащих полюсов включены последовательно и образуют одну фазу. На рис. 7-9 показано положение ротора, соотвегсгвующее возбужденному Состоянию полюсов / н 4, когда ток протекает по первой фазе с обмотками, рас-лоложенныАШ на этих полюсах. Если эту фазу отключить и подать ток во вторую фаау с обмотками иа полюсах 2 и 5, то ротор повернется на 1/3 зубцового деления по часовой стрелке. Прн возбуждении полюсов 3 п 6 ротор повернется на такой же угол против часовой стрелки. Дискретность угла поворота ротора (шаг) при простой коммутации тока в фазах составит бц, = 2л/(3г), где г - число -эубцов на роторе. Дискретность угла поворота намагничивающей силы будет вн с = 2я/рп где р - число пар полюсов статора, а отношение электоического шага к механическому г,1=3г/р . Если, не отключая первой фазы, включить также ток во вторую (возбудить полюсы 2 и 5), то ротор повернется на половину основного шага, т. е. на угол вщ - 2n/{G2). После этого надо, чтобы ток протекал через вторую фазу, затем через вторую и третью (возбуждены полюсы 2 и 5, а также 5 и 6), затем через третью и т, д. Уменьшение дискретности угла достигается также в многостаторных конструкциях ШД, в которых секции статоров развернуты друг относительно друга на часть зубцового деления. Чередование коммутации но фазам и секциям дает возможность уменьшить дискретность в г раз, где г-число самостоятельных секций. При рассмотрении математического описания шагового электропривода к основному уравнению движения электропривода добавляются уравнения равновесия напряженнй всех электрических контуров, образуемых обмотками ШД. Работа шагового электропривода в обц№м случае характеризуется системой ;у равнений 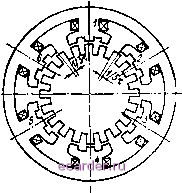 Рис, 7-9 (7-5) где J - суммарный момент инерции, приведенный к валу двигателя; Л - суммарный момент нагрузки; Мд - элекгрсмагннтный вращающий момент двигателя; 00 - угол поворота ротора; u/, F -мгновенные значения напряжений, токов и потокосцеплений k-ro электрического контура; i? - электрическое сопротивление ft-го контура при k I, 2, 3, т. Для ненасыщенной магнитной цепи (7-6) гДеХу - коэффициенты самоиндукции н взаимоиндукции обмоток; f - 1,2, k. Коэффициенты Lik зависят or картины распределения магнитной индукции в воздушном зазоре и являются периодическими функциями угла поворота ротора. Электромагнитный момент ШД dA dQ где Л = 2 hk - суммарная алектромагнитная энергия ШД; в = аЙр угол поворота ротора в электрическизс радианах. 246 с учетом (7-6) окончательно получим т т (7-7) Система уравнений (7-5) вместе с (7-6) и (7-7) характеризует гговедение шагового электропривода во всех динамических режимах при различных входных воздействиях. Для разных конструкций ШД эти уравнения могут быть упрощены и конкретизированы. Но и тогда они получаются достаточно сложными и практическое использование их оказывается возможным лишь с применением ЦВМ, Для анализа отдельных режимов работы и выбора ШД пользуются экспериментальными зависимостами и уравиенияш: упрощенных моделей шагового электропривода.
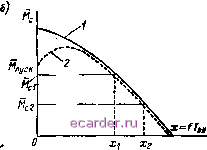 Рис. 7-10 Характеристика статического синхронизирующего момента ШД получается из общего выражения элекгроыагнитного момента (7-7) в предположении, что время досгнження токами контуров установившихся значений много меньше, чем время отработки шага, и при движении ротора в пределах шага токи остаются постоянными. Тогда с учетом периодичности изменения коэффициентов L/k (б) электромагнитный момент может быть раз-южен в гармонический ряд Мд 2 v Sin + *v). (7-8) где Мщу/ и ctv - амплитуды и начальные фазы гар.могтческих составляющих электромагнитного момента. При дальнейшем упрощении за электромагнитный момен! принимается первая гармоника ряда MJ = i sine. (7-9) Выражение (7-9) по форме полностью совпадает с уравнением угловой характеристики обычного синхронного двигателя. Угат б в формуле (7-9) определяет угловое рассогласование ротора в электрических градусах (илн радианах) между текущим его положением и устойчивым в данном такте коммутации. Если начало движения ротора в пределах шага отсчитывать от устойчивого падожения предадущего такта, то вместо (7-9) получим Мд = sin (Ь.с - Ф). J! Ф=9н.с - 9. Характеристика статического синхронизирующего момента ШД позволяет оценить допустимую статическую нагрузку привода и угловую мо-ментную статическую ошибку. Пусковой момент ШД MnytjK определяется ординатой точки пересечения угловых харакгеристпк, построенных для двух смежных тактов коммутации (рис. 7-10, а). При использовании шагового электропривода в системах ЧПУ важное значение Имеет оценка его быстродействия при отработке единичного шага. Без учета 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 [81] 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
|||||||||||||||||||||||||||||||||||||