
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 [82] 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 электромагнитных нровдссов в обмотках ШЦ н прн представлеиии мо- 1ГруЗКИ суммой СОСТЯВЛЯЮиУ!Х сухого и вязкого трения (.VI; = + влияния мента нагр + яdф/dO нелинейное дифференциальное уравнение отработки шага приводится к виду + 25 Sin (О , -ф) -м. Sign () , (7-10) где Т = ]/(0(,; о)о = КглТД/ - угловая частота собственных колебаний элект. ропривода; % = а/(2ГЛ1от) - относительный коэффициент затухания; ро = М1М ,. Решение уравнения (710) тем нли и£1ым методом позволяет получить переходную характеристпку. Прл высоких частотах коммута[щи токи в обмотках могут не достигать устя-новившихся значений и электромагнитный момент ШД будет снижен, Чтобы сохранить работоспособность шагового электропривода в таком режиме, необходимо снижать и мочеат нагрузки. Допустимый момент нагрузки в зависимости от частоты входных импульсов в режиме квазиравномерного движения шагового электропривода определяется по так называемой механической характеристике. Приближенное аналитическое уравнение механической характеристики можно получить из уравнения энергетического баланса - равенства механической работы и накопленной электромагнитной энергии в пределах отработки одного шага в режиме равномерного квэзиустановившегося движения с постоянной средней скоростью Afc0.i.c- \ /Ид[ф, f(Olrf<p. (7-11) Усредняя алектромагннтный момент в пределах шага по углу и принимая, что модуль вектора суммарной намагничивающей силы изменяется во времени по экспоненциальному закону с эквивалентной электромагнитной постоянной времени Гэ. можно уравнение для индукторного ШД привести к виду МсЭн. с- /Иу f (l -ve~ )d. (7-12) где Myet - макс1шальиое (установившееся) значение усредненного по углу электромагнитного момента; бц.с/и,-средняя угловая скорость ШД; ~ 1 - время, отведенное для отработки шага при частоте входных импуль- Fycr-Fo I-cos 9 . с - соз/-; v = -г-= т-: , ,--;-~--постоянный коэффициснт при / = const; Fy н F(, - установившееся и начальное значения модуля векторе суммарной намагничивающей силы. Его решение в о. е. имеет внд М, I ~yxh (1 -e-iv) I (, ,2д-у (7-13) где h\ = Mc/Mrt - относительный момент статической нагрузки при = Луст. * ~ Tsjtn - относительная частота. Примерный внд .механической характеристики ШД, построенной по уравнению (7-1.3), показан на рис. 7-10, б (кривая t). При низких частотах, когда возникает прерывистый режим работы ШД, теоретическая характеристика сущесг-венно огли-1аегся от опытной (кривая 2). Эго объясняегся тем, что уравнение (7-13) справедливо лишь при f > f, где - граничная частота прерывистого режима. Максимально допустимая статическая нагрузка определяется пусковым моментом /H vcK при / = 0. /Максимальный скзчок частоты, при котором информация ие теряется, называется частотой приемистости шагового электропривода. Обычно максималь- иая частота режима равномерного движения в несколько раз превышает частоту ппиемистости. Выход шагового электропривода на максимальную скорость должен осуществляться при плавном или ступенчатом нарасгаиии частоты. Эго относится также к режимам остановки и снижения скорости. Законы иараставня и спада частоты формируются в программно-задающей части систем ЧПУ устройством разгона-торможении. 7-3-2. УПРАВЛЕНИЕ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ Схема управления шаговым электроприводом (рис. 7-11) содержит коммутатор К и усилитель мощности (УМ) в виде релейных усилителей У1 - УЗ, которые включают и отключают обмотки двигателя ШД. г-]\ 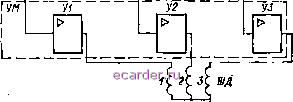 Рис. 7-11 Пусть триггеры Т2 н ТЗ находятся в единичном состоянии, а триггер Т1 в нулевом; тогда открыт релейный усилитель У1 и ток проходит ко обмотке первой фазы. В этом состоянни подготовлены к пропуску импульсов со входа / ячейки И21, Н41 и Я5/, а со входа - ячейки И22, И32, И62. Если импульсы поступают по входу /, то первый импульс через ячейку И41 поставит триггер Т2 в О , подтвердит состояние О триггера TI через ячейку И21 и состояние 1 триггера ТЗ через ячейку И51. Таким образом, после прохождения первого импульса под током будут находиться фазы 1 и 2. Второй импульс пройдет через ячейки НИ, И41 и И51, поставит триггер Ti в 1 , подтвердит О триггера Т2 и 1 триггера ТЗ. После второго импульса прекратится ток в фазе /, а фаза 2 останется под током. При прохождении шести импульсов по входу / соблюдается порядок коммутации токов в фазах: 1-1, 2-2-2, 3-3-3, 1. Если импульсы поступают по входу , то они попадают иа триггеры через схемы совпадений второй группы И12, И22, И32, И42, И52, И62 и обеспечивают обратный порядок коммутации 1-1, 3-3-3, 2-2-2, 1. 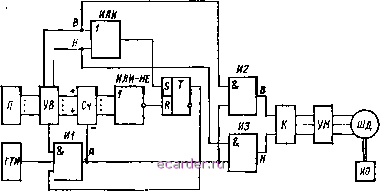 Рис. 7-12 Связь воспроизводящей и программно-задающей частей позиционной системы ЧПУ с ШД иллюстрируется функциональной схемой рис. 7-12. Числовая программа П через устройство ввода (УВ) вводится в счетчик Сч. По окончании записи цифровой информации и формирования команды пуска в прямом (В) нли обратном (Н) направлении откроется схема совпадения И1 и импульсы от генератора ГТИ начнут поступать через ячейку И2 и ИЗ на распределитель импульсов (РИ) и одновременно на вход вычитания счетчика Сч. При отработке числа шагов, заданного программой, счетчик будет установлен в нуль и на выходе схемы ИЛИ -- ИЕ появится логическая единица. Триггер Т установится в нулевое состояние, и дальнейшее поступление импульсов на счетчик и схему управления ШД прекратится. Скорость ШД может устанавливаться и изменяться в цикле позиционирования с помощью блока задания скорости, представляющего собой управляемый делитель частоты (иа схеме не показан). Схема, подобная рассмотренной, может строиться по замкнутому принципу. Тогда движение ИО контролируется импульсным датчиком нможения и списывание со счетчика осуществляется импульсами датчика по каналу 6 (штриховые линии на рис. 7-12)- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 [82] 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |