
|
| |
|
Слаботочка Книги шается п ои может оказаться соизмеримым с уровнем помех. Этот недостаток преодолевается тем, что ниже определенного порога рассогласования амплитуда формируется постоянной или по определенному алгоритму, а демодулирующее устройство выявляет только знак рассогласования. Таким образом, в зоне малых сигналов нарушается принцип пропорционального управления по ошибке, что, однако, ие ухудшает, а, наоборот, улучшает свойства АСУ ЭП, позволяя уменьшить статическую ошибку. Амплитудный метод преобразования информации нашел прн-меиенне, в первую очередь, в позиционных системах, от которых часто требуется более высокая статическая точность, чем от контурных, но в настоящее время амплитудные системы стали широко применяться и при контурном управлении. В позиционных системах программное перемещение ИО по координате хр и пропорциональный ему угол электрической оси Фпр остаются постоянными на один цикл позиционирования, а обработка продолжается до совмещения механической оси с электрической, т. е. до нулевого рассогласования - % = О (с точностью, определяемой статической ошибкой следящей системы). В контурных системах задание непрерывно или с определенным периодом квантования изменяется, поэтому происходит непрерывное слежение механической осн за электрической. Если информация поступает в унитарном коде, то для формирования задания х, применяются регистр-накопитель и сумматор, данные в который с регистра-накопителя передаются один раз за период квантования. С целью повышения точности применяются так называемые-системы с динамическим уравновешиванием, т. е. замкнутые системы измерения рассогласования между положениями механической н электрической осей, в которых электрическая ось следит за механической как в состоянии покоя, так и при любом программируемом ее изменении. Такая схема (рис. 7-22, а) имеет два замкнутых контура: контур регулирования положения и контур для измерения рассогласования. В замкнутый контур регулирования положения входят: схема синхронизации СС, на которую поступают импульсы от интерполятора с частотой и импульсы обратной связи частотой реверсивный счетчик РСч; цифроаналоговый преобразователь код - напряжение (ПКИ), выходное напряжение которого подается на вход аналоговой части АСУ ЭП; ДОС с демодулятором (ДМ), а также преобразователь напряжение - частота (ПИЧ) н коммутатор (К). ЭДС вторичной обмотки ДОС преобразуется ДМ в сигнал постоянного напряжения, а затем помошлю ПИЧ - в последовательность импульсов с частотой 7о.с, пропорциональной входному напряжению ПИЧ. Переключение каналов импульсов отработки иа вход сложения или вычитания счетчика РСч выполняется коммутатором К в зависимости от знака рассогласования (или фазы вторичной ЭДС датчика, изменяющейся зависимости от знака рассогласования на 180 *). Второй замкнутый контур относится к измерительной системе. В ней автоматт!чески формируется угловое положение электрической оси, которая поворачивается в сторону устранения рассогласования с механической осью. Амплитуды напряжений для питания первичных обмоток фазового датчика должны быть пропорциональны: одна - синусу, а вторая - косинусу угла Фпр, в свою очередь, пропорционального заданному перемещению ИО по координате. 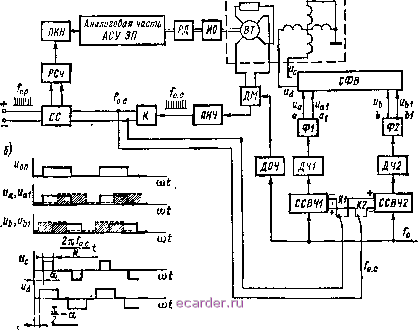 Рис. 7-22 На схемы сложения-вычитания частот ССВЧ1 и ССВЧ2 синусно-косииусного преобразования подаются опорные импульсы частотой /о и импульсы от ПИЧ частотой / .с через ключи KI и К2, Эти ключи подают поочередно импульсы с частотой /.с то к схеме ССВЧ1, то к схеме ССВЧ2, причем, например, для положительного направления движения они подаются на вход сложения ССВЧ1 и на вход вычитания ССВЧ2. На выходах делителей частоты ДЧ1 и ДЧ2 формирователями Ф1 и Ф2 формируются по две последовательности прямоугольных импульсов. На выходе ДЧ1 импульсы последовательности Oi сдвинуты по фазе по отношению к импульт! сам основной последовательности а на -90 *, а на выходе ДЧ2 импульсы последовательности сдвинуты на 4- 90 по отношению к последовательности Ь. В результате сложения частот на входе ДЧ1 прямоугольные импульсы основной последовательности на его выходе а будут сдвинуты по фазе относительно опорных, снимаемых с делителя ДOЧ в сторону опережения (влево) па величину лД, JjN, а импульсы последовательности, сформированные в результате вычитания частот на ДЧ2, сдвигаготся в сторону отставания (вправо) на такую же величину. Сдвиг импульсов последовательностей 1 и bi по отношению к опорным будет равен соответ-ственио -п/2-\-JifJ/N и л/2 - L,JI- Выходные импульсы с ДОЧ поступают иа демодулятор ДМ, а с ДЧ1 (последовательности а и %) и ДЧ2 (последовательности b а bi) - на схему формирования выходных питающих напряжений (СФВ). Выходное напряжение Uc С СФВ образуется как разность напряжений основных последовательностей а и 6, т. е. Длительность разнополярных прямоугольных импульсов составит 2Tifo J/N, а половина паузы а = л/2 - nfJ/N. Выходное напряжение по каналу d формируется как разность напряжений посчедовательностей bi и Ud (0 = м (0. и длительность этих прямоугольных импульсов будет л - 2iif,J/N, а полупауза 1 = n[t, J/N = л;/2 - а. Разложенпе в ряд Фурье нечетной разрывной функции (О имеет вид Wc (О =-~ fcos asin co-f 1-cos За sin 3o) + 4- cos 5a sin бсиг... n \ о о Напряжение (t) получится при замене а на л;/2 - а: ч-а (О = sin asin (at - sin За sin Зт/ + -~ sin 5а sin 5о)Л . .J, где (О = 2nfJN. Основные rapMOHHKit Ui (i) = Um cos a sin Ы и а (О = - От sin а sin ы/ имеют амплитуды, пропорциональные косинусу и синусу угла а: = Vm cos а и t/g = t/m sin a, где Vm = = 4t/,/n. Высшие гармоники являются нечетными и быстро убывают. Если еще включить соответствующие фильтры, то влияние высших гармоник уменьшится и ими можно пренебречь. Таким образом, в результате непрерывного изменения длнтель-Ностн прямоугольных импульсов за счет поступления импульсов €>Рратной связи будут автоматически также непрерывно изменяться амплитуды питающих напряжений фазового датчика и положение ь пространстве его электрической оси. Положение электрической определяется информацией канала обратной связп, что позпо-яег функционировать системе при малых рассогласованиях, прн сторых слежение электрической оси за механической не прекра-*Цается. Из-за нелинейности характеристики преобразователя на- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 [87] 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |