
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 [89] 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
г с d ппппппппппппппппппппппппппппппппп ППП[1ПППППППППППП1 a>t пппп пппп jot tot Рис. 7-24 при задании напраоления Назад импульсы последовательности q будут опережать импульсы опорной последовательности. Использование одного фазового датчика и одного канала управления в позиционной фазовой системе имеет ограниченное практическое применение, так как в этом случае нельзя обеспечить управ-ленне перемещением в любую заданную точку по координате на отрезке определенной длины с требуемой точностью. Если ошибка по углу фазовой системы составляет Дф, то для линейного перемещения в одном направлении па величину L она вызовет линейную ошибку 6=4Дф. (7-14) Максимальная длина, которую моекет отрабатывать система с заданной точностью, составит I ~ Л гда лоп-допустимая линейная ошибка. Если принять Дф = 3,6 , то получаем максимальный рабочий ход: при бдоп = ОД мм Ц, = 5 мм, при бдп 0,01.мм Lc = =0,5мм,т.е.величину очень малуюи явнонедостаточную,например, для механизмов подач металлообрабатывающих станков. Для расширения максимального рабочего хода прн заданной линейной точности применяют многоканальные систе\пд с каскадным соединением датчиков. Роторы датчиков отдельных каналов связываются кинематической передачей, а вторичные обмотки поочередно подключаются к демодулятору (фазовому дискриминатору) специальным коммутатором. Увеличевие точности при переключении каналов поясняется рис. 7-25, на котором показаны характеристики фазового дискриминатора непрерывного действия, представляющие собой зависимости выходного напряжения дискриминатора Uy от линейного перемещения х по координате для каналов грубого (ГО), среднего (СО) н точного (ТО) отсчетов. Передаточное число i между роторами датчиков второго и первого каналов должно быть выбрано так, чтобы полный рабочий ход датчика второго канала (180°) перекрывал угловую ошибку датчика первого канала (:i/t) Ацг. Практически максимальную рабочую зону датчика принимают несколько меньшей, например 5л/6 для дискретного широтно-импульсного фазового дискриминатора и я/2 - д1я фазового дискриминатора непрфывиого действия. В последнем случае / = я/(2Дф). (7-15) Максимальная линейная ошибка при (щаш канале согласно (7-14) с учетом (7-15) составит - 1 - МЯКС м - макс -макс л - 21 270 й максимальная линейная ошибка при двух каналах будет R 1 -макс Аналогично для т каналов Очевидно, что ошибка должна быть не больше допустимой линейной ошибки, т. е. 6 бдоц. Заменяя 6 на бдоп, можйо из 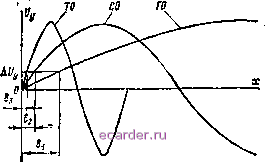 Рис. 7-25 (7-16) найти число каналов, необходимых для обеспечения требуемой точности при заданном максимальном рабочем перемещении iog/. ,sr/(26son) logi Для удобства набора и ввода программы, а также отсчета показаний датчиков различных каналов о1чпо передаточное число берут равным 10 или 100 для счисления 8; 16; 32 или 64 (для двоичной системы). 7-5. СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ С упрАгл5иощсй ВЫЧИСЛИТЕЛЬНОЙ машиной 7-5-1, ПРИНЦИПЫ РАБОТЫ И ОСНОВНЫЕ ФУНКЦИИ УСТРОЙСТВА ЧПУ С УВМ Системы программного управления с управляющей вычислительной машиной (УВ-М) строятся как на базе использования серийных лшии-ЭВМ и микропроцессоров, так н на базе создания специализированных управляющих вычислительных машин и вычислительных систем. В качестее примера построения системы ЧПУ с УВМ рассмотрим устройство ЧПУ типа Н55-2, предназначенное для автоматизированного улр.авления многок0ординат1гымн станками [441 (буква Н означает, что управление непрерывное, е, контурное; первая цифра 5 означает общее число уирашгяемых Координат; вторая цифра 5 означает число одно>еменнэ р-аботающих 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 [89] 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||