
|
| |
|
Слаботочка Книги ный регулятор Р2, с передаточной функцией Црг (jt?). Рассматривая замкнутый внутренний контур {р) как звено с эквивалентной малой постоянной времени, параметры регулятора нужно выбирать так, чтобы исключить влияние на динамику внешнего контура эквивалентной постоянной времени Т-, При расчете параметров регулятора внешнего контура внутре11ний замкнутый контур в соответствии с изложенным выше можно заменить апериодическим звеном с постоянной времени При настройке внутреннего контура на ОМ принимают Т- = - 2Г,1. Если во внешнем контуре есть свои малые постоянные времени, то Т входит в состав суммарной малой постоянной времени. Если звенья с малыми постоянными времени включены в цепи обратных связей и значения этих постоянных времени действительно малы, практически можно не выделять их пз других постоянных времени. Рассмотренный внешний контур может, в свою очередь, выступать как внутренний по отношетию к третьему контуру и т. д. Такой принцип построения системы называется принципом подчиненного регулирования, так как работа ка1кдого внутреннего контура подчинена внешнему контуру. Два главных достоинства определяют широкое распространение систем подчиненного регулнроваиня. 1. Простота расчета н настройки. Система разбивается иа ряд контуров. Каждый контур включает в себя регулятор, за счет придания которому определенных динамических свойств получаются стандартные характеристики. Настройка в процессе наладки системы ведется начиная с внутреннего контура. Поскольку регу-лятэ имеет простую передаточную функцию, а качество настройки может быть легко оценено по результатам сравнения реакции контура на скачок управляющего воздействия со стандартной переходной характеристикой, наладка системы оказывается простой. 2. Удобство ограничения предельных значений промежуточных координат системы. Поскольку выходной сигнал регулятора внешнего контура является предписанным значением для внутреннего контура, ограничение выходной координаты внутреннего контура достигается за счет ограничения определенным значением выходного сигнала регулятора внешнего контура. Вместе с тем из принципа построения системы подчиненного регулирования очетидно, что быстродействие каждого внешнего контура будет ниже быстродействия соответствующего внутреннего контура. Действительно, если в первом контуре частота среза ЛАЧХ составит ojcpi l/{27tii), то, даже при отсутствии во внешнем конт>ре других звеньев с малыми постоянными, кроме Wi (р), частота среза его ЛАЧХ будет (орв = \/{2Ti)-= 1/(47,). Для третьего контура при тех же условиях = 1/(87) н т.д. На самом деле в каждом из коит>-ров могут быть и свои собственные малые постоянные времени, вследствие чего частоты их среза будут еще ниже. Поэтому системы подчиненного регулирования редко строятся с числом контуров больше трех. 1-3-5. РЕАЛИЗАЦИЯ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ РЕГУЛЯТОРОВ, ВЫПОЛНЕННЫХ НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ В рассмотренных выше контурах обеспечение их стандартных настроек осуществлялось за счет придания требуемых динамических свойств регуляторам. В аналоговых системах управления эти регуляторы представляют собой операционные усилители, работающие в режиме суммирования токов. 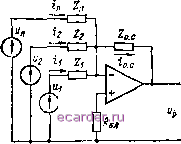 м Рис. I-I4 Рис. Ы5 Входные сигналы щ - и подаются на внешние входные R- или /?С-цепи, обозначенные 2j, Z, (рис. 1-14) и включенные на инвертирующий вход усилителя. На этот же еход включаетсяобрагная связь Z.p. Неинвертирующий в.ход через балластное сопротивление замыкается на общую шину. За счег выбора Комплексного сопротивления обратной связи и внешних входных сопротивлений регулятору придаются требуемые динамические свойства. Поскольку современные интегральные операционные усилители имеют весьма высокий коэффициент усиления и широкую полосу пропускания, при расчете динамики контуров можно воспользоваться ynj)omeHHofl передаточной функцией регулятора, полученной Б предположении, что собственный коэффициент усиления усилителя k(, бесконечно велик. Тогда передаточная функция по некоторому -му каналу может быть записана как Д р(р) Д о (р) (1-19) В табл. 1-1 приведены такие передаточные функции для пропорционального (Я), интегрирующего (Я), пропорционально-интегрального (ПИ), дифференцирующего (Д), пропорционально-дифференциального (ПД) и пропорционально-интегрально-дифференциального {иЙД) регуляторов. На основании формулы (I-I9) легко получить передаточную функцию регулятора при любой схеме входных цепей и цепи обратной связи. Передаточная функция по данному каналу (р) не зависит от внешних входных сопротивлений других каналов. Это обеспечивает возможность иметь различные передаточные функции регулятора по разным каналам за счет разных внешних входных сопротивлений. Для регулятора, имеющею п входных каналов, с учетом (1-19) можно прн fti, оо записать выражение, связывающее выходное напряжение со всеми входными сигналами; Таблица 1-1. Передаточные функции некоторых типов регуляторов Тип регулятора Реализация регулятора на опсрациоыион усилителе Связь параметров пбрша-точной функции со значениями сопр01Н11лс[шП и емкостей
PCo., p - Ro. cPo.c 1 2 3 4 5 6 7 8 [9] 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
||||||||||||||