
|
| |
|
Слаботочка Книги ГЛАВА ВОСЬМАЯ АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ, ОБЕСПЕЧИВАЮЩИМИ РЕГУЛИРОВАНИЕ НАТЯЖЕНИЯ ПЕРЕМАТЫВАЕМОГО МАТЕРИАЛА 8-1. ЗАДАЧИ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ, ОСУЩЕСТВЛЯЮЩИМИ РЕГУЛИРОВАНИЕ НАТЯЖЕНИЯ 8-1-1. ПРЯМЫЕ И КОСВЕННЫЕ МЕТОДЫ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ПОСРЕДСТВОМ ИЗМЕРЕНИЯ УСИЛИЯ, МОМЕНТА И МОЩНОСТИ В машинах и механизмах, предназначенных для перемотки полосовьЕх материалов, таких, как листовой металл, бумага, различные пленки и т. п., встает задача регулирования усилия в полосе, т, е. натяжения. В большинстве случаев точность поддержания натяжения (или регулирования его по заданному закону) непосредственно влияет на качество продукта. На pitc, 8-1, а показана кинематическая схема намоточного устройства: узел 1 может представлять собой валки последней клети стана холодной прокатки, последнюю секцию бумагоделательной машины или другой узел механизма, из которого полоса 2 выходит с постоянной скоростью. На намоточном устройстве она наматывается б рулон 3, 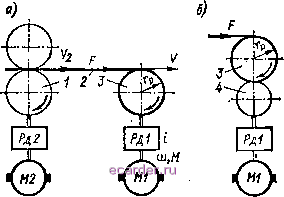 Рис. 8-1 Валки 1 и рулон приводятся во враш,еиие электродвигателями, оборудованными собственньши автоматическими системами управления. Система управления электроприводс?м валков 1 осуществляет обычно стабилизацию скорости валков (см. гл. 5). Задачей электропривода намоточного устройства является регулирование илн поддержание натяжения. Еслн производится размотка py.TOHa, то полоса движется в направлении, противоположном показанНОму на рисунке, и двигатель намоточного устройства работает в режиме торможения. Поскольку момент, развиваемый двигателем намоточного устройства, прикладывается к валу, на который наматывается полоса, скорость двигателя Ml, которая должна обеспечиваться в каждый данный моыеит времени, определяется как скорость движения полосы V, так и текущим значением радиуса рулона Гр. В ряде механизмов, обычно когда устройство работает только в режиме намотки, момент двигателя прикладывается к несущему валу 4, на который опирается наматываемый рулон (рис. 8-1, 6). В этом случае при изменении радиуса Гр не требуется изменения скорости двигателя и при V = const задача системы управления электроприводом наматывающего устройства сводится к стабилизации скорости нли момента. А1омеит на валу наматывающего устройства включает в себя следующие составляющие: М = М -Ь Л1 , -[- Мд,ф + (8-1) где М,1о, - полезный момент, т. е. момент, необходимый для создания заданного натяжения F; Мот - момент, необходимый для преодоления потерь в системе двигатель - механизм ; Мф - момент, затрачиваемый на деформацию изгиба полосы при намотке рулона; М, , -динамический момй1Т, обусловленный ускорением намоточного устройства при разгоне и торможении и изменением угловой скорости рулона, связанным с изменением его радиуса. В завнсимости от условий работы соотношения между этими моментами могут быть различны. Полезный момент определяется значением усилия F и в ряде случаев значительно превышает значение момента потерь, что позволяет пренебречь влиянием последнего на работу системы. Момент Л1д ф тем меньше, чем тоньше перематываемая полоса металла; практически он равен нулю для материалов, имеющих малую жесткость, например для бумаги. Динамическая составляющая момента будет рассмотрена ниже. В процессе намотки полезный момент определяется выражением Moo.==frp, (8-2) т. е. при постоянном усилии натяжения F = const он прямо пропорционален радиусу рулона. Полезная лющность есть Paj. = FV (8-3) И при постоянном натяжении полотна, независимо от радиуса, пропорциональна скоростн полосы. Если двигатель через редуктор вращает вал, на который наматывается рулой, то его скорость должна изменяться в соответствии с выражением = (8-4) где i - передаточное число редуктора. Отсюда ВИДНО, что при данном значении V диапазон регулирования скорости двнгателя равен диапазону изменения радиуса рулона. Различают два способа управления натяжением: 1) по регулируемому параметру, когда натяжение измеряется с помощью того илн иного измерителя натяжения, выходное напряжение которого на входе замкнутой системы сравнивается с предписанным значением; 2) по косвенно определенному значению натяжения, т. е. по одной нз величин илн по их комбинации, меняющейся в функции F. Системы с косвенным измерен[1ем натяжения имеют широкое распространение, хотя их недостатком является необходимость введения поправки для учета статических потерь (Л1лот) а при перемотке толстой полосы - и момента, необходимого для изгиба полосы при намотке и размотке (М.). Если последняя составляющая поддается учету, то учет потерь вследствие их неопределен-И0СТЕ1 и сложной зависимости от многих факторов часто оказывается затруднительным. При работе с большими зиаченЕгяни натяжений потери составляют небо.чьшую часть общей мощности и их изменение не влияет сколько-нибудь заметно на точность поддержания натяжепия. Прн малых значениях натяжения роль потерь возрастает н погрешность or их неточного учета может оказаться значительной. С этой точки зрения наиболее перспективным является использование систем с прямым измерением натяжения. Обычно даже натянутая пачоса, проходящая между валками 1 и намоточным устройством (рис. 8-1, а), провисает под действием собственного веса. Изменение натяжения приводит к изменению положения полосы в пространстве. Это позволяет использовать в качестве датчиков натяжения устройства, измеряющие отклонение положения полосы от заданного н преобразующие его в электрический сигнал. Другим распространенным способом из.мерения натяжения является такой, когда измеряется давление на подшипники со стороны валика, который огибает натянутая патоса. Давление преобразуется в электрический сигнал, например, с помощью магиитоупругого датчика, принцип действия которого основан иа изменении магнитных свойств сердечника из электротехнической стали под действием давления на сердечник. Выражения (8-2) и (8-3) могут служ[!ть основанием для оценки возможностей построения системы с косвенным измерением натяжения. Если пренебречь разницей между моментом на валу дви--гателя и полезным моментом, считая, что влияние трех последних слагаемых в выражении (8-1) либо ничтожно мало, либо будет скомпенсировано, а также пренебречь потерями вращения электро-, двигателя Ml, то можно сказать, что электромагнитный MOMent 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 [92] 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |