
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 [93] 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 двигателя должен изменяться по закону С другой стороны, Б результате сравнения этих выражений может быть сформулирован наиболее распространенный закон косвенного регулирования натяжения: прн заданном постоянном натяжении F надо поддерживать постоянным якорный ток, меняя поток возбуждения двигателя пропорционально радиусу рулона. Второй способ косвенного регулирования натяженпя состоит в регулировании полезной мощности, которая должна поддерживаться постоянной при данной скорости и натяжении и изменяться при изменении V илн заданного натяжения. Одним из путей реализации данного способа является измерение и регулирование пу-тел! воздействия на напряжение преобразователя электромагнитной мощности двигателя, которая считается примерно равной полезной. В [49] показано, что в ряде случаев с точки зрения уменьшения значения габаритной мощности двигателя наматывающего устройства оказывается целесообразным применять комбинированное управление, когда при изменении радиуса рулона от минимального значения до 65-80 % максимального скорость двигателя изменяется за счет воздействия на его магнитный поток прн постоянном напряжении, а оставшаяся часть диапазона нзменеиня радиуса рулона покрывается за счет изменения напряжения при постоянном магнитном потоке двигателя. 8-1-2. ЗАДАЧА ПОДДЕРЖАНИЯ НАТЯЖЕНИЯ В ПРОЦЕССЕ РАЗГОНА И ТОРМОЖЕНИЯ Б завнсимости от назначения механизма и характера технологического процесса разгон и торможение могут быть или не быть рабочими режимами. Так, например, на бумагоделательной машине заправка бумаги на наматывающее устройство производится на полной рабочей скорости н задача поддержания натяжения на постояинолЕ уровне в процессе изменения скорости в широких пределах не стоит. На друшх механизмах (например, на станах холодной прокатки, продольно-резательных станках для бумаги и др.) заправка полосы производится либо при неподвижном механизме, либо на низкой заправочной скорости-. В процессе разготЕа и торможения осуществляется перемотка полосы и должно поддерживаться заданное натяжение. В этом случае прн разработке системы управления натяжением необходимо знать закон из.менения динамического момента. Динамиче-ск1[й Момент на валу двигателя Ml (рнс. 8-1, а) определится как М -J-- где / - момент инерции вращающихся частей иаматывак*щего устройства вместе с рулоном, приведенный к двигателю; ю - угловая скорость двигателя. Учитывая, тго V = (мГр/1, а следовательно, МОЖНО зап1!сать dt Гр dt rl dt * Составляющая Мдищ обусловлена необходимостью создания ускорения dYjut при данном радиусе рулона Гр и равна М . = :. (8-5) Входящее сюда значенне / зависит от Гр. Составляющая Мд 2, обязанная своим существотаннем из-мшйю Гр, есть = (8-6) Момент инерции рулона включает в себя неизменный момент инерции вращающихся частей механизма н двигателя / и меняющийся с изменением радиуса рулона момент инерции наматываемого (разматываемого) рулона где т д- 10л {rl- Гр.мнн) В - выраженная в килогра>шах масса материала в рулоне с удельной плотность q Ь/ь,{\, при текущем радиусе г, радиусе вала, на который наматывается материал, fp.nmi н ширине материала В\ квадрат радиуса инерции рулона равен р2 = (г + г н)/2-Тогда y = J + r = ?rJ+/ , - (8-7) где /о = У - -ЮлВг ,m/(2i), а составляющие динамического момента на основании (8-5) н (8-6) будут определяться в соответствии с выражениями 1(ркв vi\ dr (q- wnb vi\ Лдлнг = - [--riV + jo (8-8) Связь между радиусом рулона и скоростью перемотки может быть установлена, еслн записать выражения для изменения объема рулона AQp за время в течение которого радиус рулона меняется С другой стороны, эту величину можно таразтъ чеез толщину полосы б, ее ширину В и длину пер.кггаш10Г0 за время t t материала I ==Vdi: о AQp = B6\VdL о Из этих двух выражений текущее значение радиуса рулона определится как Лр=)/г=р. ,+7<Й. (8-9) а его производная После подстановки этого выражения Б выражение для Мд е2 получается дина ~ 1 2i Р 1 г J 2.i (8-10) 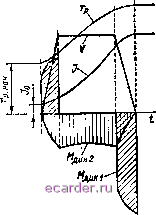 Рис. 8-2 При размотке, когда знак drfdt будет отрицательным, знак дин2 поменяется на обратный. Выражения (8-7) - (8-10) позволяют прн известных Ар. нач. б, /о, <7, В н заданном характере изменения скоростн во времени рассчитать завнсимости изменения радиуса рулона, момента инерции и динамических моментов от времени. Их характер показан на рис. 8-2. 8-2. ТИПОВЫЕ СТРУКТУРЫ АВТОМАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ, ОБЕСПЕЧИВАЮЩИЕ СТАБИЛИЗАЦИЮ НАТЯЖЕНИЯ 8-2-1. АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ с РЕГУЛИРОВ.АНИЕМ МОЩНОСТИ Как следует нз (8-3), постоянной скорости движения полосы V и постоянному натяжению соответствует постоянство мощности, расходуемой иа создание натяжения. Поддержание постоянства 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 [93] 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |