
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 [94] 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 полезной мощности натяжения затруднительно, и в большинстве случаев системьл строятся как системы с измерением и поддержанием постоянства электромагнитной мощности двигателя, представляющей собой произведение ЭДС двигателя на ток якоря н отличающейся от полезной мощности на сумму мощности потерь в механизме наматывающего устройства, мощности потерь на вращение двигателя и моищости, затрачиваемой на деформацию полосы при изгибе. Одна пз схем, построенных по принципу измерения электромагнитной мощности, приведена на рис. 8-3. Двигатель намоточного устройства (М) питается от преобразователя Пр, за счет изменения напряжения которого регулируется скорость двигателя как при разгоне и торможении, так и в процессе изменения радиуса рулона. Поток двигателя, создаваемый обмоткой возбуждения ОВМ, остается постоянным. Электромагнитная мощность измеряется с помощью измерительного генератора (ИГ), ток возбуждения которого (а прн линейной характеристике намагничивания ПГ - н поток возбуждения) пропорционален току якоря двигателя, так как его обмотка возбуждения ОВИГ включена на шунт Ш в якорпон цепи. Тогда ЭДС измерительного генератора есть i 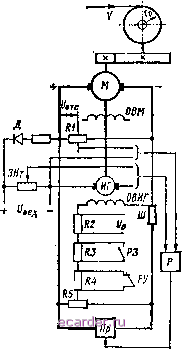 Рис, 8-3 где - коэффициент пропорциональности меаду потоком воз-бу>кдепия ИГ и током якоря двнгателя. Напряжение ИГ сравнивается с предписанным значением, которое задается задатчиком натяжения ЗНт. Поскольку мощность должна быть пропорциональна скорости V согласно (8-3), то ведущее напряжение (Уд меняется пропорционально этой скорости (часто в качестве 0 используется напряжение тахогенератора на валу двигателя А12 последней клети нлн секции на рнс, 8-1, а)г При данном бвед перемещение движка ЗНт приводит к изменений натяжения. Б процессе намотки рулона радиус его увеличивается, что при неизменной скорости приводит к увеличению натяжения и росту якорного тока, ЭДС с измерительного генератора стремится возрасти, а замкнутая система регулирования с точностью по статической ошибки поддерживает ее постоянство, обеспечивая тем самым и постоянство электромагнитной мощности. В схеме предусмотрены узлы ограничения скорости двигателя прп его работе вхолостую, компенсации потерь и компенсации динамического тока в переходных режимах. Первый, работающий в режиме отсечки, представляет собой узел сравнения (7 с частью напряжения преобразователя Сотс снимаемой с резистора ki- В процессе перемотки Оврд > Соте н днод д закрыт. На холостом ходу ток якоря мал н система регулирования, стремясь поддержать постоянство мощности, увеличивает скорость двигателя за счет увеличения напряжения преобразователя. Когда напряжение Ус станет больше Свсд на вход регулятора (р) поступит отрицательный сигнал, ограиичиваюпщй рост напряжения. Учет потерь представляет собой достаточно сложную задачу, так как потерн не зависят однозначно от скорости двигателя, а определяются всем комплексом факторов, действующих в процессе перемотки и носящих часто случайный характер. Однако в ряде случаев удается выделить постоянную составляющую потерь и составляющую, приблизительно пропорциональную скорости наматывающего устройства. Для примерной компенсации потерь в цепн возбуждения ОВИГ действуют постоянное напряжение Vq и часть напряження преобразователя сделителя R5, приблизительно пропорциональная скорости двигателя М. Оба этих напряжения действутот встречно падению напряження на шунте. В результате ЭДС ИГ уменьшается и замкнутая система, поддерживая ее в соответствии с Увед, увеличивает электромагнитную мощность приблизительно на мощность потерь. Релшмы ускорения н замедления контролируются включающимися на это время реле соответственно РУ и рз. Прп разгоне в процессе иамотки, когда электромагнитную мощность надо увеличить, в цепь ОВИГ вводится сопротивление r4, а при замедлении, когда ее надо уменьшить, - исключается r3. Недостатком системы с поддержанием на постоянном уровне электромагнитной мощности является низкая точность измерения мощности. Одной из причин этого является непостоянство потока возбуждения двигателя, который фактически зависит от реакции якоря. Кроме того, зависимость потока возбуждения ИГ от якорного тока может считаться лннeiшoн только приблизительно. 8-2-2. АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ С ПОДДЕРЖАНИЕМ ТОКА ЯКОРЯ В соответствии со сформулированным в п. 8-1-1 принципом .косвенного поддержания натяжения на постоянном уровне, когда поток дзнгателя должен меняться пропорционально Гр, а ток при Г = const сохраняется постоянным, большинство систем регулирования натяжения строится из двух взаимосвязанных систем: системы стабилизации тока якоря двигателя наматывающего устройства с воздействием на напряжение главного преобразователя и системы регулирования ЭДС двигателя с воздействием на поток возбуждения. Поскольку со = iVjr, а = СдОзФ, то при поток изменяется пропорциональна радиусу рулона (8-11) где р ипкс - максимальный радиус рулона, а Фидец. - соответ- ствующий поток. /3/ Рис. 84 Схема электропривода иаматывающего устройства с косвенным поддержанием натяжения на постоянном уровне и коррекцией его но сигналу датчика натяжеми-я приведена на рис. 8-4. Система управления током якоря включает в себя контур регулирования 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 [94] 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |