
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 [95] 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 тока с датчиком ДТ и регулятором РТ и подчиненный контур регулирования напряження с датчиком ДН и регулятором РН, выходное напряжение которого воздействует на вход системы управления реверсивного тиристорного преобразователя {ТП1). Предписанное значение тока якоря формируется -в виде задающего напряжения на выходе пропорционального усилителя н состоит из четырех слагаемых: основного задающего сигнала, пропорщю-нального заданному натяжению и снимаемого с задатчика натяжения (ЗНт); сигнала компеисадни динамической составляющей тока к; сигнала компенсации потерь н сигнала коррекции по натяжению с выхода регулятора натяжения (РНт). При компенсации потерь приближенно предполагается, что wk. значение зависит от скоростн рулона и эта зависимость -моцет-руется функциональным преобразователем {ФП1), Система регулирования ЭДС построена принципиально так же, как соответствующий контур в системе двухзоииого регулирования (см. п. 2-2-3), с той лишь разницей, что внутренний контур за счет включения функционального преобразователя ФП2, который моделирует характеристику намагничивания двигателя, представляет собой коитур регулирования потока с регулятором РПт, а не кои-т>р регулирования тока возбуждения. Благодаря этому сигнал на выходе регулятора ЭДС (РЭ), являющийся предписанным значением регулируемой величины для внутреннего контура, в процессе перемотки пропорционален потоку возбуждения, а следовательно, и радиусу рулона, и может служить мерой раднса. Регулятор ЭДС включает в себя суммирующий усилитель У2, на входе которого сигнал датчика ЭДС сравнивается с задающим напряжением, пропорциональным скоростн перемотки, и аналоговый нлн цифровой интегратор И. В результате РЭ имеет характеристики интегрирующего регулятора, что, с одной стороны, как это было показано в п. 1-3-1, необходимо для обеспечения стандартной или близкой к ней настройки конг>ра ЭДС, а с другой - вано для того, чтобы регулятор запоминал радиус рулона. Принцип построения системы предусматривает, что всегда, вне зависимости от режима работы (разгон, установившийся режим леремоткн, торможение, выключенное состояние), поток возбуждения двигателя пропорционален радиусу рулона. В режиме пере-JWOTKH это обеспечивается автоматически за счет действия замюг-той системы регулирования ЭДС. Прн неподвижном наматывающем устройстве снгнаш йд. н равны нулю и необходимо предусмотреть возможность задания начального потока возбуждения, соответствующего данному (если речь идет о начале намотки - минимальному) значению радиуса рулона. Это осуществляется при Охвате РЭ отрицательной обратной связью через контакты ЗР. Регулятор ЭДС приобретает характеристики апериодического звена с единичным коэффициентом усиления, и на выходе его устанавливается напряжение, равное нагяжению задания радиуса рулона з.р. Перед началом леремоткн контакты ЗР размыкаются, н это напряжение на выходе иптегратора сохраняется, пока на входе РЭ сигнал равен нулю. Поток возбуждения, соответствующий текущему значению радиуса рулона, нужно сохранить н при обрыве полосы. Обычно обрыв фиксируется специальным датчиком, воздействующим па реле, которое своим контактом (на рнс. 8-4 не показан) шунтирует У2, благодаря чему напряжение на входе иптегратора становится равным нулю, а на его выходе фиксируется напряжение, соответствующее значению радиуса рулона, при котором произошел оыв. Однако даже при обеспечении фиксации требуемого значения потока, если не принять дополнительных мер, скорость наматывающего устройства будет резко возрастать. Действительно, если предпаюжнть, что напряжение, снимаемое с ЗНт, постоянно, резкое уменьшение якорного тока при обрыве полосы приведет к тому, что замкнутая система регулирования тока, стремясь восстановить заданный ток, будет увеличивать напряжение преобразователя ТП! н это приведет к увеличению скорости двнгателя. Чтобы этого не произошло, ЗНт питается от усилителя УЗ, характеристика которого такова, что при входном сигнале, равном нулю, его выходное напряжение равно напряжению ограничения. На входе сигнал УЗ = V сравнивается с сигналом обратной связи по ЭДС. В норма>г1ьиом режиме намотки задающий сигнал прнмер1ю равен сигналу обратной связи, напряжение на выходе УЗ равно напряжению ограничения и постоянно. Прн обрыве, когда ЭДС начинает возрасаать, сигнал обратной связи оказывается больше 63, усилитель УЗ выходит из ограничения и система переходит в режим поддержания постоянства ЭДС за счет воздействия на на-нряжение преобразователя. Поскольку поток двигателя прн этом соответствует значению радиуса рулона, прн котором произошел обрыв, система подл,ерживает скорость двигателя, примерно соответствующую данным значениям скорости V и радиуса г. Назначением сигнала является задание динамической составляющей тока, за счет которой создается динамический ыомеит Л4д[н = -диш + тина. составляющие которого определяются формулами (8-8) и (8-10). Еслн толщина перематываемой полосы мала, то радиус рулона меняется медленно и скорость изменения радиуса drjdt мала. Тогда составляющей Мдидз пренебрегают, полагая, что Мдип = Л4ди 1. С учетом того, что система регулирования ЭДС меняет поток пропорционально радиусу, можно определить закон, по которому долл1ен меняться динамический ток при разгоне и торможении: Л4ди.11 Л1див1 р. макс * дни - с Ф г г~Ф нлн, С учетом первого из выражений (8-8), р д макс Если yi представляет собой усилитель с передаточным коэффициентом, равным единице, одинаковым по всем входам, и коэффициент передачи РТ по обоим каналам тоже одинаков, то компенсирующее напряжение должно быть - д. 1н. дпч* (8-13) Из (8-12) видно, что это напряжение связано функциональной зависимостью с радиусом рулона ускорению. Прн установившейся скорости к = 0. функциональная схема устройства, формирующего напряженпе щ., показана на рнс. 8-5, а. Напряжение на входе функционального преобразователя (ФУТ) пропорционально радиусу рулона. С помощью ФП в соответствии с(8-12) и (8-13) формируется напряжение прямо пропорционально КУ/ЛН КЗ/ 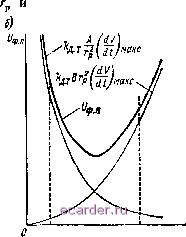 Рис. 8-5 Ифп равное к при (dVIdt),. Реальное значение ускорения задается установкой делителя напряжения (ДН). Компенсирующее напряжение имеет разный знак прн ускорении и замедленнн, что оСес[!ечивается включением контактов КУ или КЗ соответственно. В установившемся режиме все контакты разомкнуты. В качестве напряжения, пропорционального радиусу рулона, может быть использовано напряжение на выходе регулятора ЭДС, если подчиненным контуром является коитур потока, как на рнс. 8-4. В ряд схем оно получается как результат деления напряжения датчика скорости (тахогенератора) на двигателе наматывающего устройства д.с = д.с 1 = д.с7 на напряжение тахогенератора на двигателе М2 клети или се]кции (см. рис. 8-1, а) где feg - коэффициент пропорциональности. Характер зависимости Иф.д от радиуса рулона прн dVjdt = const показан на рис. 8-5,6. Прк разных соотношениях Vmkc и V Может быть аппроксимирована более илн менее сложной кривой. 10 л. в. БашэрИЕ! 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 [95] 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |