
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 [97] 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 Таким образом, при постоянной скорости перемотки V поддерживаемое постоянным напряжение и .у2 оказывается во второй зоне регулнроваиня пропорциональным электромагнитной мощности двигателя . В установившемся режиме перемотки, прн w j,i>> г/д.э, иапря->кенне на выходе ФП4 равно нулю. При обрыве полотна, когда ЭДС двигателя возрастает, напряжение на входе ФП4 меняет знак, а на вход РТ поступает сигнал, ограиичиваюшзй скорость двигателя. ГЛАВА ДЕВЯТАЯ АДАПТАЦИЯ В АВТОМАТИЧЕСКИХ СИСТЕМАХ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ 9-1. ОСНОВНЫЕ ПОПОЖЕНИЯ ПО ОРГАНИЗАЦИИ АДАПТИВНЫХ СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ 9П-1. ЗАДАЧИ УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ СИСТЕМАМИ ЭЛЕКТРОПРИВОДОВ И МЕХАНИЗМОВ Нестацнон ар ность работы электроприводов как объектов управ-леиня зависит от СЕЮсобов управления электродвигателями постоянного и переменного тока и от свойств механнзлюв в процессе эксплуатации. Изменение параметров электроприводов происходит вследствие изменения следующих основных величин: параметров электромагнитных контуров в депп преобразователь-двигатель , передаточных коэффициентов преобразователей, потока возбуждения двигателей, моментов инерции механизмов, частот упругих механических колебаний, взаимного изменения механических параметров в многосвязных системах многодвигательных промышленных установок. Кроме того, в процессе эксплуатации АСУ ЭП могут наблюдаться значительные изменения по спектральному составу !! интенсВЕИостн возмущающих и управляюшлх воздействий, что может приводить к существенному увеличению динамических Ошибок системы и к необходимости перенастройки параметров регуляторов для мннимвзации этих ошибок, Функциональная схема адаптивной АСУ ЭП показана на рис. 9-1. Основная часть системы включает в себя объект управления (ОУ) н регулятор (Р), охваченные обратной связью. В качестве основной части системы может рассматриваться любая автоматическая система управления иеста1ионарным электроприводом, которая была рассмотрена в предыдущих главах. Реализация адаптивного управления производится в системе дополнительным блоком адаптивного управления (БАУ), который включает в себя блок обработки информации о текущем состоянни объекта управления или всей системы и блок нереиастройкн параметров регуляторов в соответствии с принятым критерием качества работы адаптивной системы. \0счо8ная часть [системы 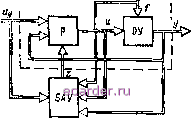 Рис. 9-1 Адаптивным управлением решаются следуюшле основные задачи: 1) при произво.1ьиом изменении параметров электроприводов в системе производятся такие изменения параметров регуляторов, при которых дниамнческие свойства системы для заданных воздействий не изменяются. Предполагается, что система в исходных условиях оптимизирована и в дальнейшем обеспечивается стабильность показателей качества системы; 2) при начальном отсутствии информации о параметрах электроприводов и воздействиях на систему управления производится автоматический поиск оптимальных условий работы системы в соответствии с заданным критерием качества. Условия для второй задачи могут быть и другими. Например, имеется достаточно полная информация о системе электропривода, параметры которой не изменяЕОТся, но при изменении условий функцЕЮнирования меняются заранее неопределенным образом воздействия на систему управления. Тогда необходимо выполнить перенастройку параметров системы путем изменения параметров регуляторов таким образом, чтобы обеспечить оптимальный режим работы системы. Решение второй задачи связано с поиском оптимальных режимов работы системы. Решение первой задачи может быть в ряде случаев выполнено применением достаточно простых npnevioB комЕЕеисации изменяющихся параметров систем электроприводов. Этого можно добиться, если применить, например, внутренние обратные связи, охватывающие часть структуры ОУ с нестационарными параметрами, и обеспечить определенную избыточность по быстродействию контуров регулирования с этими обратными связями по отношению к наружным контурам регулирования. Если координаты и параметры системы, несущие информацию о ее нестациокарности и используемые для создания компенсационных связей, непосредствепно измерены быть ие могут, то возможно применение наблюдающих устройств, восстанавливающих необходимые координаты и параметры системы электропривода. Теория наблюдающих устройств разработана в основном для стационарнь(х объектов, н ее применение для нестационарных объектов возможно только в соответствии с гипотезой квазистациоиарности систем в процессе оценки параметров и состояний ОУ. Наряду с этим могут быть применены разнообразные приемы адаптации, зависящие от конкретных требований, предъявляемых к системам управления н от условий их функционирования. Приемы адаптации используются в тех случаях, когда оптимизация систел1ы управления выпшгняется при неполной исходной информации о системе и когда в процессе ее функционирования наблюдается заранее непрограммируемые изменения параметров и воздействий. Эти приемы, как правило, связаны с оценкой параметров и состояния системы (идентификацией системы) путем ее возбуждения и автоматической перенастройкой параметров или структуры управляющей части, а также введения дополнительных сигналов. Функционирующая АСУ ЭП постоянно находится под воздействием различного рода возмущающих факторов (изменения моментов сопротивлений и напряжения сети, помехи датчиков, электромагнитные наводки, тепловые дрейфы и шумы и др.). Оценку состояния функционирующей системы целесообразно выполнять, используя естественные динамические процессы. Однако это не всегда возможно, в силу того что энергетический спектр возмущений может быть слишком узким или представлять собой сочетание периодических сигналов только на определенных частотах. В этом случае необходимо специально вводить тестовые сигналы, которым придаются формы, оптимальным образом соответствуЕощие состоянию оценки системы. Форма такого сигнала зависит и от вида описания состояния систелшь Для получения информации о состоянии системы в виде временных характеристик используют импульсные и ступенчатые сигналы, а в виде частотных характеристик - синусоидальные, прямоугольные и другие периодические сигналы. В качестве тестовых сигналов могут использоваться также и случайные сигналы с заданными характеристиками. Информация о функционирующей системе может быть получена в виде амплитудно-фазовых частотных характеристик, импульсных переходных функций, оцененных параметров и координат системы и в другой форме. Рассмотрим некоторые методы идентификации, которые используются в дальнейшем для выполнения адаптивных систем управления. 9-1-2. ОПРЕДЕЛЕНИЕ ЧАСТОТНЫХ И ВРЕМЕННЫХ ХАРАКТЕРИСТИК Частотные и временные характеристики нанболее полно характеризуют динамические свойства АСУ ЭП. Частотные характеристики могут быть определены путем непосредственного измерения, если в систему вводить синусоидальные сигналы разной частоты. Амплитуда выходного сигнала на частоте со; может быть измерена путем пропускания сигнала через узкополосный фильтр, выпрямитель и сглаживающий фильтр. Непосредственное измерение фазы может быть выполнено с помощью фазового дискриминатора, на Выходе которого формируется сигнал, пропорциональный разности фаз двух периодических сигналов, поступающих на его вход. Применяют и иные способы измерения фазы. В частности, используют сравнение выходного сигнала системы с выходным сигналом дели при подаче на входы системы н модели гармонических тесто- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 [97] 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |