
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 [59] 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 с отсутствием каких-либо контактов или щеток. К недостаткам автотрансфоргматоров этого тина следует отнести большую намагничивающую мощность, (потребляемую из сети (ток холостого хода достигает 40% номинального), низкий созф (0,70-0,80), а также большие габаритные размеры и вес. Плавную регулировку переменного напряжения можно также осуществить с помощью индукционного регулятора, представляющего собой асинхронный двигатель с фазным заторможенным ротором; ротор двигателя может поворачиваться относительно обмоток неподвижного статора при помощи червячного редуктора. При таком конструктивном выполнении асинхронный двигатель можно рассматривать как трансформатор с вращающимся магнитным полем. В обычном траноформагоре э. д. с. во вторичной обмотке возникает при пересечении ее изменяющимся по величине и направлению магнитным потоком. Электродвижущая сила во вторичной (роторной) обмотке оо-тенциал-регулятора возникает благодаря пересечению ее неизменным по величине и (вращающимся в пространстве магнитным потоком, созданным трехфазной статорной обмоткой, питаемой от сети переменного трехфазного тока. Расположим ротор относительно статора таким образом, чтобы геометрические оси обмоток отдельных фаз статора и ротора совпадали. При этом э. д. с, индуктируемые в статорной и роторной обмотках вращающимся магнитным потоком, будут также совпадать по фазе. EicjiH геометрические оси одноименных фазовых обмоток статора и ротора сдвинуть в пространстве на некоторый угол, то и э. д. с, индуктируемые в этих обмотках, будут сдвинуты на тот же угол. Действующие значения э. д. с, индуктированные в обмотках статора, в обоих рассмотренных выше случаях одинаковы, так как максимальное значение магнитного потока остается неизменным. Описываемое устройство может быть использовано для изменения угла сдвига фаз между напряжениями статорной и роторной обмоток или, как говорят, для изменения фазы напряжения на зажимах роторной обмотки относительно напряжения сети (т. е. напряжения на зажимах статорной обмотки). Это устройство назы- вается иедукционньш фазорегулято-ром и применяется в схемах сеточного регулирования 1ВЫНрямлеиного папряжспия (см. § 7-4). В фазорегуляторе отсутствует непосредственная электрическая связь между обмотками. Если осуществить такую связь по схеме рис. 7-7, включив обмотку ipoTopa последовательно с нагрузкой, то полученное устройство можно использовать для плавной регулировки переменного напряжения. Это устройство получило название ин- 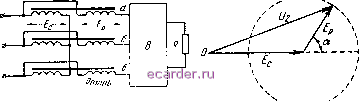 Статор Рнс. 7-7. Схема индукционного потенциального регулятора. Рис. 7-8. Векторная диаграмма фазовых напряжений потенциального регулятора (для одной фазы). дукционного потенциального регулятора. Действительно, фазовое напряжение на выходе потенциал-регулятора bi равно геометрической сумме э. д. с. статорной (fc) и роторной (fp) обмоток (рис. 7-8). Поворачивая ротор, изменяют угол сдвига между векторами fc и fp и тем самым меняют величину напряжения в пределах от c + fp до Ес-Е. Изменяя угол поворота а в пределах от О до 180 эл. град., можно плавно в широких пределах изменять напряжение U2. Если, например, Ер = Ес, то напряжение U2 можно практически изменять в пределах от нуля до 2Ес. Индукционные регуляторы напряжения применяются для плавного изменения переменного напряжения в широких пределах. В настоящее время регуляторы этого типа изготовляются яа различные мощности, начиная с нескольких киловольт-ампер до сотен киловольт-ампер. Потенциал-регуляторы имеют высокий к. п. д. и отличаются большой надежностью в работе. К их недостаткам следует отнести невысокий коэффициент мощности (созф), значительный вес, большие размеры и высокую стоимость. 7-4. СЕТОЧНОЕ РЕГУЛИРОВАНИЕ Величину выпрямленного напряжения можно регулировать, изменяя параметры вентилей, образующих выпрямительную схему. Из рассмотренных ранее типов вентилей для этой цели могут быть применены управляемые ионные вентили (тиратроны) или управляемые нремниевые диоды. Для регулировки величины выпрямленного напряжения используется шойство тиратрона или управляемого диода проводить ток лишь при одновременном соблюдении двух условий: а) потенциал анода является положительным по отношению к катоду и б) потенциал анода достигает значения, соответствующего потенциалу зажигания тиратрона. Поэтому регулировку выпрямленного напряжения можно осуществить, меняя момент зажигания тиратрона. Рассмотрим в качестве примера схему двухполупе- риодного выпрямителя, приведенную на рис. 7-9. Схема состоит из анодного Tpi и сеточного Трг трансформаторов, двух тиратронов В\ и Вг, вспомогательного выпрямителя сеточного смещения В и фазорегулятора Фр. Трансформатор и фазорегулятор питаются от общего источника переменного тока. Регулировку величины выпрямленного напряжения в схеме рис. 7-9 можно производить: а) изменяя напряжение выпрямителя (т. е. напряжение смещения между сеткой и катодом тиратрона) или б) изменяя фазу переменного напряжения на сетке тиратрона по отношению к напряжению на его аноде. Для выяснения принцина действия схемы расамотрим 1фивые, приведенные на рис. 7-10. На рис. 7-10,а изображены кривые напряжений на зажимах вторичной обмотки анодного трансформатора Рис. 7-9. Схема двухполупериодного регулируемого тира-тронного выпрямителя. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 [59] 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 |