
|
| |
|
Слаботочка Книги [1] 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 Активная радиолокация в отличие от тссивиой позволяет определять все координаты цели (не только напрааиетие ва нее); преиму-10 щество пассивной системы - скрытый характер локации (со стороны РЛС нет излучения). Полуактивную радиолокацию целесообразно применять в РЛС управления летательными аппаратами, где возможность уменьшить вес и габариты бортовой аппаратуры за счет исключения из нее передающей части РЛС особенно важна. Передатчик вместо этого устанавливают на пункте управления. При активной радиолокации с активным ответом запросный и ответный сигналы кодируются, чтобы по коду можно было определить государственную принадлежность цели ( свой - чужой ) и получить дополнительную информацию. Такой метод радиолокации весьма-эффективен и как средство навигации. Например, если запросный сигнал посылается с самолета или морского корабля, а ответчиком служит наземный передатчик - маяк, то последний служит хорошим навигационным ориентиром для штурмана корабля или самолета. Третье важное преимущество систем с активным ответом - выигрыш в дальности действия, обусловленный значительно большей мощностью ответного сигнала по сравнению с отраженным от цели. Однако ответную аппаратуру можно установить только на своем объекте. Поэтому наибольшее применение получила активная радиолокация по пассивным целям {рис. 1.3, а), которую для краткости будем называть активной. 3.2. Методы определения местоположения целей. Общность физических основ радиодальнометрйи и радиопеленгации находит выражение еще в том, что местоположение цели можно установить не только по ее дальности и углам, измеренным из одной точки О (рис. 1.1), но и путем измерения или дальности, или углов из разнесенных опор-пых точек Oi, О2, О3 (рис. 1.4). Наибольшее применение получили дальномерный, разностно-дальномерный, угломерный (пеленгацион-ный) и дальномерно-угломерный (комбинированный) методы определения местоположения целей. Геометрическое место точек с одинаковой измеряемой координатой относительно опорного пункта называется поверхностью положения. Две поверхности положения, пересекаясь, образуют линию положения, а чтобы определить точку в пространстве, требуется пересечение трех поверхностей положения или линии и поверхности пЪложения. В случае нахождения цели и опорных пунктов в одной плоскости достаточ-1Ю оп)еделения двух координат цели, за счет чего число опорных станций можно уменьшить. Рис. 1.4 иллюстрирует именно плоскую задачу. Дальтмерный метод заключается в определении местоположения цели М (рис. 1.4, а) измерением расстояний между целью и опорньши пунктами Ои 0%. Каждая поверхность положения- представляет собой сферу с центром в опорном пункте и радиусом, равным дальности. Так как точки М, Oj, 0% находятся в одной плоскости, то поверхности положения переходят в окружности радиусами ОуМ = Д1 и ОМ = Да с точкой пересечения на цели М. Имеется еще одна точка пересечения окружностей, но неоднозначность измерений можно исключить. Разностно-дальномерньш, метод (рис. 1.4, б) требует наличия на плоскости двух пар опорных пунктов: Оу, Од и Ог, О г, один из них обычно общий (Ог). Каждая пара станций используется для получения линий положения в виде гипербол с фокусами в опорных пунктах. Эти линии строятся как геометрические места точек с постоянной разностью расстояний: Д1 - Да = const от Oi и Oj; Д3 - Дг = const от Ог и О3. Точка пересечения гипербол совпадает с целью М. Угломерный (пеленгационный) метод основан на использовании направленных свойств антенн. Этот метод реализуется посредством радиопеленгатора, установленного на объекте М, и двух радиомаяков, расположенных в опорных пунктах Oj и Oj (рис. 1.4, б) с базой Ь, 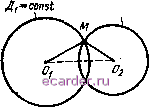 ot.}=const ,2 = const 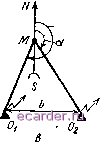 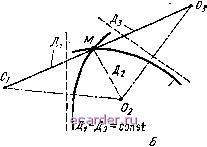 j-/?2=const. Рис. 1.4. Методы определения местоположения целей: дальномерный (а), разностно-дальномерный (б), пеленгационный (угломерный) (в). Радиопеленгатор представляет собой радиоприемное устройство с направленной антенной, а радиомаяк - передающее устройство с ненаправленной антенной. Пеленгатор измеряет азимуты ai маяка Oi и ag маяка О2, и так как линии положения с постоянными пеленгами ( 1 = const, аг = const) представляют собой прямые, проходящие под углами аи к направлению юг-север, то они имеют одну точку пересечения, которая является искомой, т. е. совпадает с целью М. Дальномерно-угломерный метод (см. рис. 1.1) требует применения только одной станции, содержащей радиодальномер и J)aдиoпeлeнгa-тор. Из точки стояния станции О дальномер определяет наклонную дальность цели ОМ = Д, а пеленгатор устанавливает лаправление на цель, т. е. ее азимут а и угол места р. Цель М находится на пересечении поверхности положения дальномера в виде шара радиуса ОМ = Д и линии положения пеленгатора -* в виде прямой с угловыми коррдинатами аир, проходящей через точку О. Этот метод наиболее характерен для радиолокации, а остальные методы - для радионавигации. Однако и в радиолокации местоположение цели определяют иногда из двух и более точек. Например, если обычная РЛС производит пеленгацию с большими ошибками, то рри-i бегают к дальномерному методу, а если д1льномерную часЛ РЛС нельзя использовать,из-за сильйых помех или вследствие применения пассивной радиолокации, то прибегают к пеленгационному методу.- § 4. Тактические показатели радиолокационных станций Тактические показатели определяют возможности использования РЛС по назначению. К тактическим данным РЛС относятся. 4.1. Зона обзора- область пространства, в которой производится обнаружение целей. Эта зона (рис. 1.5, а) ограничивается по даль-- 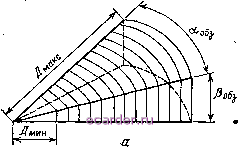  Рис. 1.5. Зона обзора РЛС (а) и элементарные объемы-этой зоны (б). ности пределами Д - Дмакс по азимуту - величиной аз и по углу места - величиной pgg. Под минимальной дальностью Дмин понимают радиус мертвой зоны, т. е. наименьшее расстояние от РЛС, на котором можно обнаружить цель и измерить ее координаты с заданной точностью. Максимальной дальностью обнаружения Дмако называется наибольшее расстояние между РЛС и целью, при котором соблюдаются заданные вероятности правильного обнаружения и ложной тревоги. Раскроем смысл этих вероятностных оценок. Прием радиолокационных сигналов происходит в условиях помех естественного и искусственного происхождения (шумовые помехи в приемнике и антенне, умышленные помехи, создаваемые противником, и т. д.). Помехи имеют случайный характер, их величина и знак заранее неизвестны, причем помехи то уменьшают, то увеличивают входное напряжение приемника. В связи с этим прием радиолокационных сигналов относится к случайным явлениям, закономерности которых изучаются теорией вероятностей. Когда цель находится в зоне обзора РЛС и сигнал цели различается на фоне помех, то происходит правильное обнаружение. Если же сигнал, находящийся в зоне обзора, не различается на фоне помех, имеет место пропуск сигнала. Вероятность первого события обозначается Рцо, вероятность второго Рдо, и так как правильное обнарУ окение и пропуск сигнала- несовместимые события, т. е. исключхтт друг друга, то сумма их вероятностей равна единице; Рдо + Рш - 1 , Когда цели нет в зоне обзора, то образуется другая группа неШв-местимых событий: помеха достаточно сильная, чтобы быть принятой за сигнал цели, вследствие чего возникает ложная тревога с вероятностью Рлт; правильное необнаружение с вероятностью Рв, происходящее благодаря сравнительно слабому уровню помехи в данный отрезок времени. Сумма Рдт + Рпн - 1- В дальнейшем первую группу событий будем оценивать вероятностью правильного обнаружения, а вторую вероятностью ложной тревоги; ими будут задаваться две другие вероятности: Рпо = 1 - - Рпо и Рпн = 1 - Рлт- Крайние значения вероятностей О и 1. Идеальными условиями приема сигналов были бы Рпо = 1 лт = О, т. е. правильное обнаружение - достоверное событие, а ложная тревоганевозможное событие. В реальных условиях Рпо < 1 и Рлт>0. Например, если максимальная дальность РЛС Дма = 300 км при Рпо = 0,95 и Рлт = 10 , то по теории вероятностей на границе зоны обзора, где Д = 300 км, цель обнаруживается в 950 случаях из тысячи, а если цели нет, то в одном случае из тысячи возникает ложная тревога. ? 4.2. Разрешающая способность РЛС - возможность раздельно наблюдать и измерять координаты и параметры движения близко расположенных целей. Выделим в зоне обзора четыре соседних элементарных объема/, 2, 3, 4 (рис. 1.5, б), в каждом из которых находится одна точечная цель. Элементы i и 2 имеют одинаковые угловые координаты, но отличаются по дальности на величину АД, элементы /, 3 отличаются только по азимуту на Да и 1, 4- только по углу места на Др, причем все цели наблюдаются раздельно. Будем сокращать каждую из величин ДД, Да, Др до тех пор, пока раздельное наблюдение целей станет невозможным. Тогда объем / и будет разреишемым объемом и его элементами ДДмин, А мин, АРмия оценивается разрешающая способность станции по дальности, азимуту и по углу места. Разрешающая способность по дальности оценивается минимальным расстоянием ДДмин между двумя находящимися на одном на-. правлении делями, при котором эти цели наблюдаются раздельно. Разрешаюищя способность по азимуту оценивается минимальной разностью азимутов Дямин двух целей с одинаковыми дальностью и углом места, при которой эти цели еще наблюдаются раздельно. Разрешающая способность по углу места оценивается минимальной разностью углов места ДРмин двух целей с одинаковыми дальностью и азимутом, при которой эти цели, еще наблюдаются раздельно. Разрешающая способность по скорости оценивается минимальной разностью радиальных скоростей Дид мин двух целей с одинаковыми координатами Д, а, р, при которой эти цели еще наблюдаются раздельно. В принципе достаточно разрешения целей по одной координате или по скорости. 4.3. Точность измерения координат и параметров движения. Ошибки измерения разделяются на грубые, систематические и случайные. Грубые ошибки - результат грубого просчета оператора или следствие возникшей в аппаратуре неисправности. Такие погрешности значительно больше остальных ошибок в данном ряду измерений, и поэтому они легко выявляются. Систематические ошибка вызываются длительно действующими факторами, например Задержкой сигнала в цепях РЛС или несовершенством метода измерений; такие ошибки в той или иной мере компенсируются калибровкой аппаратуры. Случайные ошибки зависят от случайных обстоятельств, которые не поддаются предварительному учету. Обратимся к конкретному примеру. Пример 1.1. Допустим, произведено 100 измерений дальности цели с помощью некоторого гипотетического радиодальномера. При этом случайные ошибки распределились по группам согласно табл. 1.1, Например, ошибки Дд; = - (20 - 15) м наблюдались в 4 опытах [п - 4), что соответствует частоте ошибок njn = 4/100 = 0,04, ошибки Дд; = -(15-- 10) м наблюдались в 6 опытах {п = 6), т. е. их частота nJn = 6/100 = 0,06, и т. д. ТАБЛИЦА 1.1
Среднее значение случайных ошибок Дл: (черточка - знак усреднения) равно сумме произведений ошибок, точнее, 1ереянйх значений интервалов Дхг, на их частоту nJn: 5F= ( 17,5 0,04) -f (12,5 . 0,06) (-7,5 0,13) 4- (-2,5 . 0,24) Ф (2,5 . 0,26) -f (7,5 0,17) (12.5 0,08) + (17,5 . 0,02) =0,25. Полученный результат неточный, так как отличается от математического ожидания. Так называют среднюю ошибку которую следует ожидать по результатам многократных измерений (п -> оо) и которая вычисляется при делении диапазона ошибок х на бесконечно малые интервалы (Дд;->0). Только тогда выявится строгая закономерность случайных ошибок и частота их будет называться вероятностью ошибок Р. Данные таблицы иллюстрируются посредством прямоугольников с основанием, равным интервалу ошибок Дл;,-, и площадью, равной соответствующей частоте ошибок nJn (рис. 1.6). Когда л-> оо и Дл;О, площади прямоугольников выражают вероятности появления слу- [1] 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |