
|
| |
|
Слаботочка Книги 1 [2] 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 чайной ошибки в данном бесконечно малом интервале ошибок Ал: и вершины прямоугольников попадают на кривую, называемую кривой распределения ошибок: Ординаты этой кривой (поскольку высота прямоугольника равна частоте ошибок njn, делённой на Ад;) являются производной от вероятности ошибки Рц по ее текущему значению X. Полученная производная может быть названа плотностью вероятности случайных ошибок р{х) = \\т = . (1.9) 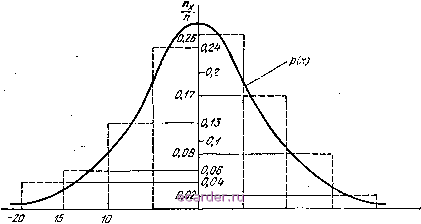 -5 0 5 10 Рис. 1.6. К примеру 1.Ь Z0 Лх,м Плоищдь под кривой распределения, шражающая суммарную вероятность ошибок, равна единице. Эта сумма распределяется непрерывно по всем значения!* случайных ошибок. Следовательно, вероятность появления данной ошибки бесконечно мала, но плотность вероятности, как предел отношения двух бесконечно малых величин, величина конечная. Вот почему по оси ординат кривой распределения откладывают плотность вероятности, а не саму вероятность ошибок. 4.4. Нормальный, закон распределения случайных ошибок. Случайные ошибки измерений, как и большинство других случайных явлений в радиолокации, возникают под действием многих независимых и незначительных по своему действию факторов, вероятность появления каждого из которых подчиняется нормальному закону распределения: p(x) = -i--e-(-)/2<r У 2л о (1.10) где р (х) плотность вероятности появления случайной величины х; X - среднее значение (математическое ожидание) величины х; - дисперсия случайной величины х; а среднеквадратическое отклонение, равное корню квадратному из дисперсии; е - основание натурального логарифма. Если измерения производятся в неизменных условиях, то каждое значение случайной ошибки х появляется с равной вероятностью как со знаком 4-, так и со маком Поэтому крийая распределения р (х) симметрична относительно оси ординат переднее значение 1с = О, т. е, центр распределения случайных ошибок равен нулю. Тогда р{х)==- (1.11) Исследуем это выражение нормального закона распределения (рис. 1.7). 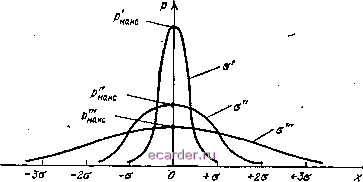 Рис. 1.7. Графики нормального закона распределения случайных величин при различных значениях о. а) Наивероятнейшее значение случайной ошибки, как было сказано, равно нулю (Jc =? 0); чем больше значение ошибки х, тем меньше вероятность ее появления (меньше р (л;)), и когда л;->-± оо. плотность вероятности ;з -> 0. б) Максимальная плотность вероятности ;Змако. наблюдаемая при д: = О, обратно пропорциональна среднеквадратической ошибке о, а именно ;5мако - 1/12яа. Вместе с тем площадь под кривой распределения, независимо от величины Рмако равна единице. Это возможно только в том случае, если большим значениям среднеквадратической ошибки соответствуют более пологие кривые распределения (на рис. 1.7 а* > а > а). Такой же вывод следует из формулы (1.11): при большей величине дисперсии о, входящей в показатель степени, увеличение \ х\ сопровождается более медленным уменьшением плотности вероятностей7> (х). в) Качество измерений тем выше, че~м меньше дисперсия (рассеяние) ошибок, так как тогда понижается вероятность появления больших случайных ошибок. г) Дисперсия суммы случайных величин равна сумме дисперсий слагаемых (это справедливо не толькоя нормального закона рас- г-- ГОРЬКОГО пределения). Например, пусть в неизменных условиях произведено п независимых измерений какого-либо параметра. Тогда случайные ошибки каждого измерения имеют одинаковую дисперсию, которую обозначим q, а дисперсия суммы ошибок в п раз больше = tuf. Среднеквадратическое значение этой суммы а = = уЪд. Но результат п измерений определяется как среднеарифметическое результатов отдельных измерений, поэтому среднеквадратическая ошибка o/n = Vnqln = qlVn. (1.12) Таким образом, с увеличением числа л опытов (измерений) некоторой величины, произведенных в неизменных условиях, среднеквадратическая ошибка уменьшается в Ул~раз, так как рассеяние случайных ошибок сказывается все меньше и меньше. д) Площади под кривой распределения, ограниченные значениями X = ±а; ±2а; ±3а, выражают вероятности того, что случайные ошибки не выходят за пределы ±а; 2b2fT; ±3а; эти вероятности соответственно равны 0,68, 0,95 и 0,997, и, поскольку 0,997 близко к единице, предельной ошибкой считают (1.13) Для оценки точности измерений, кроме среднеквадратической и предельной, пользуются срединной ошибкой Хср. Это такая величина, которую случайная ошибка может с равной вероятностью превзойти или не достичь. Срединная (вероятная) ошибка составляет /3 от среднеквадратической: (1.14) 4.5. Помехозащищенность РЛС складывается из помехоустойчивости и скрытности. Помехоустойчивость - способность станции противостоять внешним помехам, создаваемым противником. Помехоустойчивость тем выше, чем меньше внешние помехи снижают максимальную дальность действия РЛС. Скрытность работы РЛС - способность станции противостоять радиолокационной разведке, которую предпринимает противник для выявления параметров излуче-ния подавляемой РЛС. Эти данные необходимы противнику для постановки эффективных помех. 4.6. Надежность - способность РЛС работать в течение требуемого времени с сохранением всех заданных эксплуатационных показателей. 4.7. Степень автоматизация съема и обработки информации. Радиолокационные сигналы подвергаются обработке в приемном и выходном устройствах РЛС. Назначение обработки отделить сигналы от помех и извлечь из сигналов максимум полезной информации о целях. Если получателем информации является оператор РЛС, то выходным устройством станции служит индикатор, обычно электронно-лу- ч№ОГо типа. В этом случае обработка информации полуавтоматическая, поскольку в ней участвует человек. Если же получатель информации - вычислительное устройство, то съем и обработка информации полностью автоматизируются. § 5. Технические показатели РЛС Из большого числа технических показателей рассмотрим пока только три. 5.1. Форма и мощность зондирующего излучения. Излучение может быть непрерывным (рис. 1.8, а), импульсным большой скван.- 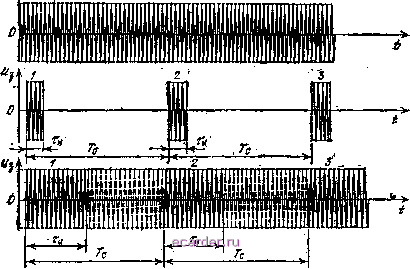 Рис 1.8. Временные диаграммы зондирующего излучения, ности - порядка сотен-тысяч (рис. 1.8, б) и импульсным малой скважности - порядка единиц--десятков (рис. 1.8, б). Под скваэ!с-ностью импульсов понимают отношение периода следования к длительности импульса Тр,: q == TJx . Периодическзо последовательность импульсов малой скважности называют также квазинепрерывным сигналом, так как имеющийся в нем интервал между импульсами относительно невелик. Излучение считается когерентным, если начальные фазы всех импульсов одинаковые или закономерно изменяются от импульса к импульсу. Если это условие не соблюдаегся, то излучение некогерентное. Представленная на рис. 1.8, в последовательность импульсов когерентная: закономерность изменения фаз выражается в ней тем, что показанное jiyHKTHpoM продолжение импульса 1 совпадает с началом импульса 2, а продолжение импульса 2 с началом импульса 5 и т. д, 5.2. Диапазоны волн, применяемы;? в радиолокации. Радиолокация осуществляется преимущественно с помощью сигналов очень высокой частоты по следующим причинам: 1) острая направленность волн, необходимая для точной пеленгации и большой дальности действия РЛС, может быть получена только при условии, что длина волны Я значительно меньше линейных размеров антенны, а это, как правило, выполняется при Ж 10 м; 2) такой выбор длины волны вызывается условиями вторичного излучения. Различают три вида вторичного излучения: зеркальное отражение, диффузное рассеяние и резонансное переизлучение. 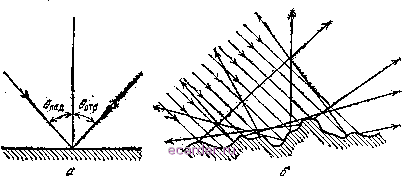 Рис. 1.9. Зеркальное (а) и диффузное (б) отражение радиоволн. Зеркальное отражение (рис. 1,9, а) происходит при облучении целей, имеющих зеркальную поверхность или шероховатости, размером менее Я/16. Так как углы падения 9пад и отражения бот равны, то зеркально отраженные волны не улавливаются антенной РЛС и сигнала не образуют- (исключение составляют волны, падающие под прямым углом к плоскости цели).- Диффузное рассеяние (рис. 1.9, б) имеет место при более шероховатой или многогранной отражающей поверхности, причем интенсивность диффузно рассеянных волн возрастает с уменьшением Я. Вторичные волны становятся еще более интенсивными в случае резонансного переизлучения, когда линейные размеры цели равны или кратны полуволне. Если же длина волны значительно больше размеров отражающей поверхности, то волны огибают эту поверхность (дифракция) и почти не улавливаются приемной антенной РЛС. Требования радиолокации способствовали развитию техники сверхвысоких частот. В радиолокации последовательно внедрялись все более короткие радиоволны: метровые, дециметровые, сантиметровые, миллиметровые, а в последние годы успешно развивается лазерная локация (оптический диапазон волн). Вместе с тем возникла необходимость в радиолокации на низких радиочастотах, которая, по-видимому, возможна только при достаточно больших размерах антенн и целей. 5.3. Технические данные системы радиолокационного обзора пространства. Эта система поэлементно облучает зону обзора РЛС  для выявления имеющихся в зоне целей и измерения их координат и параметров движения. Распространение радиоволн по .дальности происходит естественным путем и практически мгновенно - со скоростью света. Основная трудность заключается в обзоре по угловым координатам: антенна формирует диаграмму направленности в виде одного или нескольких лучей; каждый из лучей охватывает телесный угол одного элемента зоны обзора; определенным способом сообщают диаграмме направленности перемещение по такому закону, чтоёы за один цикл облучить всю зону. Длительность этого цикла называется периодом обаора Тобя- Методы обзора разделяют на однолучевые и многолучевые, мгновенные (параллельные) и последовательные. Мгновенный обзор одним неподвижным лучом применяют в РЛС, измеряющих только дальность и, следовательно, не нуждающихся в сканировании луча, например в самолетных радиовысотомерах и дальномерах. Мгновенный обзор возможен и при измерении угловых координат, но для этого диаграмма направленности антенны РЛС должна быть многолучевой и сразу охватывать всю зону обзора станции. Такой мгновенный многолучевой обзор иначе называется параллельным. Однолучевой обзор со сканированием называют последовательным, так как требует последовательного облучения всех элементов зоны. Имеются разновидности последовательного обзора. Если из двух угловых координат измеряют одну, как, например, в так называемых панорамных РЛС, то лучу антенны придают большую ширину в плоскости неизмеряемой угловой координаты для того, чтобы за один оборот (одно качание) антенны перекрывалась вся зона обзора. Такой обзор называется круговым, или секторным. На рис, 1,10, а показана диаграмма направленности (ДН), сжатая в горизонтальной плоскости, а на рис. 1,10, б - в вертикальной. Первая предназначена для РЛС, измеряющей дальность и азимут, а вторая - для РЛС, измеряющей угол места или высоту цели. Обзор начинается с кругового вращения первой антенны вокруг вертикальной оси, следующий этап дистанционный разворот второй антенны на выявленный азимут интересующей цели и последний этап - качание этой антенны вокруг горизонтальной оси с одновременным измерением угла места или высоты цели. Если для точного измерения обеих угловых координат применяется однолучевой обзор, то сканирование совершается игольчатым лучом по винтовой линии, спирали, зигзагообразно или по другой сложной траектории. При этом период обзора, естественно, больше, чем при круговом или секторном вращении плоского луча. Винтовой обзор (рис. 1.10, в) складывается из кругового вращения в азимутальной плоскости и медленного изменения положения луча по углу места. Спиральный обзор (рис. 1,10, г) означает, что проекция луча на плоскость, перпендикулярную оси вращения, имеет вид спирали. Конический обзор (рис. 1.10, д) можно рассматривать как частный случай спирального, когда угол у между осью вращения а осью луча не изменяется. Этот угол при спиральном обзоре меньше 1 [2] 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |