
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [28] 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 сигнал ошибки = е 6 определяется разностью этих временных интервалов. Если видеосигнал цели проходит через оба каскада совпадения за равное время (рис. 7.2, а), то алгебраическая сумма площадей сигнала ошибки щ равна нулю, и интегрирующая емкость в такой же мере разряжается, как и заряжается. В результате управляющее напряжение щ остается прежним. Это признак точного сопровождения цели по дальности; В случае уменьшения дальности цели (рис. 7.2, б) запаздывание сигнала цели оказывается меньше запаздывания следящих импульсов сл (время <д и ten отсчитывается относительно осей симметрии импульсов цели Мд-и следящих Mj, 4), в связи с чем видеосигнал цели более длительное время совпадает с первым, чем со вторым следящим импульсом. Реагируя на это, временной различитель вырабатывает сигнал ошибки: в импульсе щ длительность отрицательного выброса 6 оказывается больше длительности положительного выброса Мб. и так как теперь разряд интегрирующей емкости превышает заряд, то управляющеенапряжение щ уменьшается после прохождения данного сигнала. Это вызывает уменьшение длительности импульса задержки uz, самой задержки следящих импульсов <сл и постепенное устранение рассогласования {At = - ton 0). Аналогично импульсы Ms, М4 автоматически следят за движением импульса цели при его отставании (<сл < д)- 44.2. Управляющее устройство и временной дискриминатор следящего измерителя дальности. Управляющее устройство предназначено для преобразования импульсного сигнала ошибки м в непрерывное напряжение Uj, которое управляет каскадом задержки вре- менного модулятора. В простейшем случае такое преобразование осуществляется только в фильтре RC дифференциального детектора, который отнесен нами к временному дискриминатору. Будем пока придерживаться этого и считать, что напряжения на входе и выходе управляющего устройства равны между собой: м? = щ. Управляющее устройство не только сглаживает импульсы сигнала ошибки Mg, но и накапливает их энергию, т. е. производит важнейшую операцию оптимальной обработки некогерентных сигналов - последетекторное интегрирование. В следящих измерителях это происходит столь эффективно, что точность измерения близка к потенциально возможной для некогерентных РЛС. Выходное напряжение интегратора ui, благодаря суммированию сигналов ошибки в интеграторе, пропорционально текущей дальности. Оно не только управляет задержкой следящих импульсов, но и подается к аналого- вому вычислителю или исполнительному механизму. Кроме того, система АСД позволяет пропускать через селектор дальности выходное напряжение приемника Ыс лишь в небольшом временном интервале, который отрабатывается в данный момент системой АСД. Для этого генерируются стробирующие импульсы Mg, охватывающие по длительности оба следящих импульса. Стробирование этими импульсами селектора дальности используется не только при АСД, но и для АСН. Оно повышает помехоустой- 9 О -гтЛ- Ul, чивость РЛС за счет устранения влияния сигналов и помех, существующих вне отрабатываемого участка дальности. Если приемник системы АСД оптимальный, то с фильтра УПЧ снимаются треугольные видеоимпульсы щ (рис. 7.3, а) и тогда следящие импульсы (рис. 7.3, б) являются их временной производной. Действительно, когда Mj линейно нарастает, опорный сигнал имеет постоянную положительную величину Mj, а когда и линейно падает, опорный сигнал имеет такую же абсолютную величину, но обратную полярность (М4 <0). Зависимость приращения управляющего напряжения At/y p от времени рассогласования At называется характеристикой времен- ного дискриминатора (рис. 7.3, д). При At= О (рис. 7.3, б) следящие импульсы 3, 4 совпадают с видеосигналом (рис. 7.3, а) в равные отрезки времени, а поэтому управ ляющее напряжение до и после прохождения сигнала цели одинаковое (At/уцр == 0). Со сдвигом следящих импульсов в сторону опережения {At < О, рис. 7.3, в), с видеосигналом Ms в течение большего интервала времени совпадает отрицательный импульс щ (а не положительный импульс Мз), и управляющее напряжение уменьшается; например, при А = Ati приращение управляющего напряжения Аупр = At/ynpi <0. Увеличение-[Auynp I происходит до тех пор, пока рассогласование At не достигнет длительности импульса t на входе оптимального фильтра, после чего только следящий импульс м4 совпадает во времени с сигналом щ. Аналогично, но с обратным знаком изменяется At/ynp при рассогласовании А > 0. Например, при А = Аг (рис. 7.3, г) имеем А t/ynp = = Д[/у ра>0(рис. 7.3,5). В реальных условиях сигналы цели и опорный имеют несколько иную форму, в связи с чем характеристика дискриминатора сохраняет линейность только в пределах At = ±0,5ти (штрихпунктирная кривая). В этой области коэффициент передачи временного дискриминатора, равный отношению приращения управляющего напряжения к приращению времени рассогласования, является постоянной величиной: Гц 2г-ц Рис. 7.3. Временные диаграммы, иллюстрирующие получение характеристики временного дискриминатора. Ki = AU.JAt [В/с]. (7.1) 44.3. Режим поиска и захвата цели. В отсутствие импульсов цели или когда рассогласована At превышает величину rtiH, коэффициент передачи временного селектора близок или равен нулю. Тогда система переходит в режим автоматического поиска цели. Это происходит следующим образом. Импульсы цели щ подаются не только на вход временного дискриминатора, но и в схему поиска, начинающуюся с импульсного детектора, за которым следует электронное реле, нагруженное электромагнитным реле (Р) (рис. 7.1). В отсутствие сигналов цели реле (Р) обесточено и через его контакты П (поиск) к интегрирующему конденсатору С вместо дискриминатора подключается гене ратор поиска. Выходное напряжение Ыд этого генератора пилообразное, небольшой частоты. Оно плавно увеличивает задержку следящих импульсов Ыз, и строба до конца диапазона дальности, затем резко возвращает эти импульсы к исходной задержке и т. д. Когда строб набегает на цель, селектор дальности пропускает сигнал Мс и с выхода селектора импульс щ воздействует на импульсный детектор. Выходное напряжение детектора с каждым импульсом 5 быстро нарастает, и вскоре электронное реле вызывает срабатывание реле (Р), контакты которого перебрасываются в положение Сл , и к интегрирующему конденсатору С подключается временной дискриминатор. К этому моменту времени сигнал цели оказывается достаточно сцепленным со следящими, импульсами, чтобы система устойчиво работала в режиме слежения. При. выборе частоты поиска руководствуются тем, что если эта частота большая, то время совпадения бегущего строба с сигналом цели невелико и нужно рассчитывать реле на срабатывание от од-ного-двух импульсов цели. Но тогда возникает опасность ложного срабатывания схемы от одиночных импульсов помех. Если же скорость поиска выбрать малой, то переход из режима поиска в режим -слежения будет слишком длительным. Частоту генератора поиска устанавливают компромиссно - порядка герца. § 45. АСД как система автоматического управления 45.1. Структурная схема системы АСД. От функциональной схемы АСД (рис. 7.1) переходим к его структурной схеме (рис. 7.4, а), из которой видно, что АСД представляет собой замкнутую систему автоматического регулирования. Функции задающего устройства выполняет приемник РЛС, измерительным устройством служит временной дискриминатор, усилителем-преобразователем является устрой ство управления и, наконец, объект регулирования - это временной модулятор. Обратная связь от временного модулятора к временному дискриминатору отрицательная - она уменьшает время рассогласования At между запаздыванием сигнала цели и задержкой следящих импульсов 4л- Система АСД замкнута только при наличии видеосигналов Mg приемника, вместе с тем она достаточно инерционна, чтобы в случае 174 необходимости можно было применить к ней теорию непрерывного автоматического регулирования. Типовые звенья любой системы автоматического регулирования делятся на безынерционные (усилительные), с чистым запаздыванием, инерционные (апериодические 1-го порядка), интегрирующие, колебательные, апериодические 2-го порядка, дифференцирующие и форсирующие. Временной различитель, поскольку в нем имеется дифференциальный детектор со сглаживающей цепью RC (фильтром нижних частот), является инерционным звеном с коэффициентом передачи Задающее t/стройстВо (приемник) Измерительное устройство iCfi (временной Зискримина-тор) *-At Uynp Усилитель-лреодраэоатель ((/правляющее устройство) Ойьект 7егулировалия1. (времетой \ мовулятор) Одратная связь
интегратор Z Корректирующее звено /<аснад управляемой задержки ИнтеераторЛ Кър. Постоянная времени фильтра RC настолько велика, что используется только начальный участок его АЧХ. При этом условии звено ведет себя как интегрирующее. Управляющее устройство согласно его назначению должно быть интегрирующим звеном. Обозначим его коэффициент передачи через Куу. Временной модулятор, коэффициент передачи которого Към, является звеном с чистым запаздыванием, так как предназначен для изменения задержки следящих импульсов согласно приращению выходного напряжения управляющего устройства. Таким образом, общий коэффициент передачи разомкнутой системы, т. е. без учета обратной связи, К - КврКууКвш- (7-2) Автодальномеры выполняются с одним или двумя интеграторами. Обязательным является первый интегратор, входящий в состав временного дискриминатора. Второй интегратор, составляющий управляющее устройство, вводится для усовершенствования АСД. Заметим, что в литературе нередко относят к управляющему устройству оба интегратора, а временным дискриминатором считают только каскады совпадения. 45.2. Переходный (динамический) и установившийся (статический) режимы автодальномера с одним интегратором. В этом случае /Су У = 1 и общий коэффициент передачи К = Кв рКв м- Допустим, что цель неподвижная и слежение за ней начинается при рассогласовании Mq. Реагируя на это, интегратор временного дискриминатора и временной модулятор изменяют ошибку сопровождения на величину -/САо. и к приходу первого отраженного импульса ошибка сопровождения становится равной Ati = Ао - KAto = = Д/о (1 - К). (7.3) Знак - обусловлен тем, что в следящем измерителе обратная связь отрицательная. Как видно, рассогласование за один период следования изменяется в 1 - К раз, т. е. в геометрической прогрессии, и с приходом второго, третьего, ... п-го импульсов цели имеем Д/2 = At, {1 - К} = = Д/ (1 - Kf; А1г = At, (1 - Kf; ... Д< = At, (1 - К)\ (7.4) 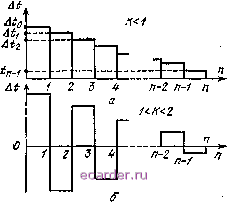 Рис. 7.5. Изменение рассогласования в системе АСД с приходом очередного импульса цели. При коэффициенте передачи К < 1 ошибка сопровождения уменьшается и Д< ->- О (рис. 7.5, а). Если К= 1, то с первого же импульса рассогласование полностью устраняется через петлю обратной связи: Ati - Atg (1 - К) = 0. При 1 < /С < 2 приращение управляющего напряжения от каждого импульса превышает величину, необходимую для полного согласования, знак At меняется, хотя амплитуда колебаний уменьшается до нуля (рис. 7.5,6). Если же /С>-2, то рабочая область временной характеристики выходит за пределы ±Ти (см. рис. 7.3) и это приводит к потере цели. Очевидно, что коэффициент передачи К не следует выбирать ббльшим единицы. Наличие интегрирующего звена в дальномере - признак того, что система АСД астатическая, т. е. она не дает статической ошибки дальности. Действительно, выходное Ыд (О и входное Ывх (О напряже. ния идеального интегратора связаны зависимостью Ыд (О = /CJmbx (О dt, которая после дифференцирования обеих частей принимает вид =К вх(0. (7.5) Значит, в интеграторе скорость изменения выходного напряжения Мд (О прямо пропорциональна входному напряжению Ывх (0. но 176 . в установившемся режиме слежения за неподвижной целью напряжение дальности Ыд (О постоянное, и следовательно, сигнала ошибки нет (йыд {f)ldt = 0). Теперь рассмотрим случай, когда цель .движется с постоянной скоростью Уд. Тогда требуется непрерывное смещение следящих импульсов согласно скорости Уд, которое возможно только при постоянном рассогласовании между импульсом цели и следящими импульсами. За период следования Тс дальность цели изменяется на УдГс, а это изменяет запаздывание отраженного сигнала на время Д/д = 2удГс/с. Настолько же должна измениться задержка следящих импульсов (Д/сл = А/д) за период Го, но так как общий коэффициент передачи системы К, то рассогласование в дискриминаторе, обусловленное движением цели, равно Д/ = Д/ол/К = AtlK = = 2идГо/сК = 2vt,IcKFc. Это соответствует погрешности измерения, которая называется скоростной ошибкой дальности: 6Д = сД/ /2 = VjlKFc. (7.6) Скоростная ошибка, как видно, тем больше, чем больше скорость цели, меньше коэффициент передачи следящей системы и меньше частота следования импульсов РЛС. 45.3. Свойства автодальномера с двумя интеграторами. Скоростную ошибку можно устранить, если ввести в АСД астатизм 2-го порядка, т. е. второй интегратор (рис. 7.4, б). Каскадом задержки следящих импульсов непосредственно управляет интегратор , а это значит, что его выходное напряжение пропорционально дальности цели Д. Но так как дальность Д является интегралом по времени от радиальной скорости цели Уд, то напряжение, подводимое от интегратора/к интегратору , должно быть пропорционально скорости Уд. Теперь по окончании отраженного импульса интегратор / запоминает скорость цели, благодаря чему напряжение дальности Мд, снимаемое с интегратора , линейно возрастает согласно этой скорости (рис. 7.6). Полученное за время - Тц приращение напряжения дальности изменяет задержку следящих импульсов настолько, что скоростная ошибка бДр исчезает. Система АСД с двумя интеграторами имеет и другие преимущества. В связи с флуктуациями отраженного сигнала амплитуда его может стать настолько малой, что в течение некоторого времени цепь АСД не будет замыкаться. Если имеется только один интегратор, .то на каскад задержки подается напряжение дальности, которое запомнил интегратор от последнего принятого импульса цели, и к тому Рис. 7.6. Временная диаграмма выходного напряжения второго интегратора автодальномера. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [28] 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |
||||||||||||||||||||||||||||||||||||||