
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 [29] 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 времени, когда вновь появятся отраженные сигналы, рассогласование может оказаться свыше ±t . Тогда, как известно, происходит потеря цели. Автодальномер с двумя интеграторами обладает памятью по скорости, которая более совершенна, чем память по дальности: при исчезновении ответных импульсов напряжение на интеграторе / остается постоянным, а это вызывает на выходе интегратора напряжение Мд, которое линейно изменяется и сдвигает следящие импульсы согласно зафиксированной скорости. В итоге сигнал ошибки не появится при возобновлении ответных Сигналов, если скорость цели постоянная. Кроме того, наличие данных не только о дальности, но и о скорости цели, полезно для расчетов в вычислителе.  Рис. 7.7. Принципиальная схема форсирующего звена системы АСД. Вторым интегратором обычно служит операционный усилитель с реостатно-емкостной обратной связью. Так как система автоматического регулирования с двумя интеграторами весьма неустойчива и может самовозбудиться, параллельно или последовательно (как на рис. 7.4, б) включается корректирующее звено. Это может быть форсирующее звено (рис. 7.7). Действие его основано на том, что резкие изменения входного сигнала почти полностью передаются конденсатором С на выход R2 звена (емкость не может мгновенно зарядиться), а это способствует ускорению переходных процессов и, как следствие, более быстрому уменьшению сигнала ошибки; в дальнейшем, по мере зарядки конденсатора С, выходное напряжение звена 2 составляет все меньшую часть от входного напряжения щ, благодаря чему исключается перерегулирование и самовозбуждение системы. Среднеквадратическая ошибка дальности в обычных системах АСД Од = 10- 15 м [111. Уменьшению ошибки способствует сокращение длительности импульсов Ти, так как при этом уменьшается интервал дальностей ctJ2, В котором возможно перекрытие сигнала цели обоими следящими импульсами. Следящий измеритель дальности целесообразно применять и при сложных сигналах, но при условии, что согласование фильтра УПЧ с сигналом производится с учетом внутренней модуляции импульсов. § 46. Автоматическое сопровождение по скорости (АСС) Метод автоматического измерения скорости цели, применяемый в автодальномере с двумя интеграторами, заключается, по сути дела, в дифференцировании дальности по времени, атак как относительное изменение дальности большинства целей мало, то точность такого метода измерения обычно невысокая. Лучшие результаты АСС дости- гаются слежением за допплеровским сдвигом частоты, который, как известно, прямо пропорционален радиальной скорости цели. Собственно измерителем системы АСС является частотный или фазовый детектор (дискриминатор, различитель). По этому признаку различают схемы частотной автоподстройки частоты (ЧАП) и фазовой автоподстройки частоты (ФАПЧ). Примером ЧАП может служить схема АПЧ приемника, компенсирующая уход частоты сигнала fc или гетеродина автоматическим изменением частоты гетеродина с тем, чтобы промежуточная частота /р = /с - /г поддерживалась номинальной. В схеме ФАПЧ производится автослежение за фазой
Рис. 7.8. Функциональная схема (а) н дискриминационная характеристика (б) системы автоматического сопровождения по скорости с ФАПЧ. (а не частотой) сигнала, но тоже изменением частоты управляемого гетеродина. Это возможно потому, что частота и фаза сигнала связаны между собой линейной зависимостью (производной или интегралом). Пусть к фазовому детектору схемы ФАПЧ (рис. 7.8, а) поступают напряжение сигнала и = Uom cos [at + ф) = t/cmsin {at + л/2 -1* -f Ф) и опорное напряжение следящего гетеродина и = (Усг m sin ч>1. Тогда на выходе фазового детектора получается напряжение постоянного тока, которое при t/crm> Vom равно [см. формулу (2.26)1 Ыфд = 2Кд/ст COS [(Ы + л/2 + ф) - (оП = 2Кл Vm sin ф. (7.7) Из построенной по этому уравнению дискриминационной характеристики, т. е. зависимости напряжения на выходе фазового детектора Ыфд от сдвига фаз ф между напряжениями сигнала и гетеродина (рис. 7.8, 6), видно, что напряжение Ыфд может служить сигналом ошибки для автоматического слежения за фазой сигнала. Действительно, при ф = О напряжение Ыфд = О, а при отклонении ф от О до ±л/2 это напряжение возрастает по абсолютной величине и изменяет знак, когда угол ф проходит нулевое значение. Сглаживающий фильтр нижних частот включён между фазовым детектором и управляющим элементом, чтобы последний реагировал только на медленные изменения частоты сигнала- и не реагировал на быстрые изменения частоты, вызванные флуктуационными шумами на входе системы ФАПЧ. Управляющим элементом может служить реактивная лампа, варикап, т. е. полупроводниковый диод с управляемой емкостью р - п-перехода, или переменный конденсатор, ро-Трр KOTopiofo вращается электродвигателем. Любой из этих элементов изменяет частоту следящего гетеродина на величину А/д согласно управляющему сигналу ир- В результате сигнал ошибки становится равным нулю, а частота гетеродина совпадает с частотой сигнала /о, и так как при сопровождении движущейся цели /о изменяется на величину допплеровского сдвига частоты, то управляющее напряжение Mynjg или частота следящего гетеродина f является аналогом радиальной скорости цели. Схема ФАПЧ в отличие от схемы ЧАП не требует специального интегратора для устранения статической ошибки скорости (частоты), так как выходное напряжение фазового детектора Мфд пропорционально разности фаз ф, т. е. интегралу от разности частот сигнала
Фазовый детентор Фильтр HUiKHUX частот Генератор опортео сигнала Рис. 7.9. Функциональная схема АСС на промежуточной частоте. И гетеродина. Это сообщает системе АСС астатизм 1-го порядка, и при постоянной радиальной скорости цели имеем A/j, =/сг -/с = О, а /сг == /с Автоматическое Слежение за частотой сигнала позволяет сделать ЧАП, а тем более схему ФАПЧ узкополосной. Отсюда систему АСС называют узкополосным следящим фильтром. Чем уже полоса пропускания фильтра, тем больше приближается к синусоидальному напряжение гетеродина и соответственно выше точность сопровождения по скорости, особенно в схеме ФАПЧ. Этому способствует также возможность уменьшения шумовой полосы пропускания приемника. Но если эта полоса слишком узкая (менее долей герца), то система ДСС недостаточно динамична, чтобы реагировать на быстрые изменения скорости цели. О качестве АСС судят еще по полосе захвата, т. е. по тому максимальному рассогласованию частот, при котором еще возможен переход к режиму слежения. С этой точки зрения схема ЧАП предпочтительнее. Наилучшие результаты дают комбинированные системы, в которых используются большие возможности ФАПЧ по точности сопровождения и ЧАП по полосе захвата Слежение по скорости можно осуществить и на промежуточной частоте (рис. 7.9). Смеситель преобразует принимаемые сигналы с частотой /с = /о ± /доп в колебания р частотой / р ± Fou, где /о - несущая частота сигнала, / р промежуточная частота и Fyon - допплеровское приращение частоты. После усиления в УПЧ преобразованные колебания ( р) подводятся-к фазовому детектору, где они сравниваются по фазе с опорным напряжением оп. имеющим 180 стабильную частоту /оп, равную номинальной промежуточной частоте. Полученный сигнал ошибки Ыфд, как и в предыдущей схеме, с помощью фильтра нижних частот и управляющего элемента изменяет частоту следящего гетеродина и тем самым уменьшает рассогласование фаз до нуля. Управляющее напряжение удр является аналогом скорости цели. Эта схема обладает повышенной помехоустойчивостью благодаря тому, что фильтр УПЧ ограничивает полосу шума на входе фазового детектора. Режиму АСС предшествует поиск цели. Схема поиска (рис. 7.10) начинается с фазового детектора (ФД2), который при наличии напряжения на выходе УПЧ в работает как синхронный детектор. В ре- Смеситель Система АСС Следящий гетеродин Упрадпя/ощий зленент Схема поисна Генератор пилоодразноео напряжения ФД1 \ищ
Переключатель Фнчг Рис. 7.10. Функциональная схема АСС с автоматическим захватом цели. жиме слежения выходное напряжение смесителя ир соответствует полосе пропускания УПЧ и поэтому напряжение Ыцр достаточно для того, чтобы с помощью детектора (ФД2) и фильтра нижних частот (ФНЧ2) отключить генератор поиска (генератор пилообразного напряжения) от управляющего элемента и подключить к нему детектор (ФД1) с фильтром (ФНЧ1) системы АСС. При потере сигнала Но к переключателю не поступает напряжение от детектора (ФД2) и управляющий элемент соединяется с генератором пилообразного напряжения Ып- В результате частота гетеродина непрерывно изменяется, пока спектр напряжения р не окажется в полосе пропускания УПЧ. Тогда возобновляется режим слежения, так как генератор поиска отключается. § 47. Автоматичеа<ое сопровождение по направлению (АСН) методом конического сканирования Системы АСН являются следящими измерителями угловых координат. Они классифицируются по тем же признакам, что и неследящие измерители: а) амплитудные и. фазовые в зависимости от того, как определяется направление на цель - сравнением амплитуд или фаз принимаемых сигналов; б) с последовательным и одновременным сравнением сигналов. Первое означает, что антенна имеет один фазовый центр, который, вращаясь, вызывает коническое сканирование лу ча; при этом угловые координаты цели выявляются сравнением сигналов, принятых в ряде последовательных положений луча антенны. Отсюда происходит второе название этой системы - с интегральным равносигнальным направлением (РСН). Системы АСН с одновременным сравнением сигналов называют и системами с мгновенным РСН, или моноимпульсными. В данном случае антенна имеет по два фазовых центра как в азимутальной, так и в угломестной плоскостях и это позволяет выявить направление на цель даже по одному (моно означает один) сигналу, сравнивая порознь его одновременные значения на выходе азимутальной и угломестной пар фазовых центров антенны. в) Одноканальные и многоканальные системы. Первые применяются рри последовательном сравнении сигналов, так как для этого достаточно одноканального приемника, а вторые - при одновременном сравнении сигналов, так как параллельный прием сигналов, сфокусированных в различных фазовых центрах антенны, возможен только при многоканальном приемнике. 47.1. Радиосигналы при коническом сканировании. В системах АСН с коническим сканированием используются параболические антенны с вращающимся облучателем или рефлектором. Фазовый центр облучателя смещен от фокальной линии таким образом, что при вращении облучателя ось ДН антенны образует коническую поверхность (рис. 7.11, а). Угол 2у при вершине конуса должен быть меньше ширины 2фо ДН. За период сканирования о. i. h, 4 максимум ДН описывает окружность на плоскости zy (рис: 7.11, б, в, г). Пусть этот максимум пересекает ось z в начале каждого периода {t = о. 4- ) Когда цель находится на оси х, принимаемый радиосигнал имеет постоянную амплитуду (рис. 7.11,6). Если . цель смещена только по азимуту от этого РСН и расположена на оси у в положении f (рис. 7.11, в), то отраженный сигнал оказывается промодулирован-ным с частотой сканирования согласно огибающей /. Например, максимум амплитуды сигнала наблюдается в момент tz, когда луч наиболее близок к цели, а минимум амплитуды имеет место в момент t, когда луч наиболее удален от цели. При смещении цели по азимуту на &)льший угол (положение 1 ) пределы изменения амплитуды (глубина модуляции) возрастают, но характер изменения огибающей остается прежним. Если цель отклонена от РСН только по углу места и находится на оси 2 в точке 2 (рис. 7.11, г), то максимум луча антенны наиболее близок к цели в момент (4) и наиболее удален от нее в момент 4-Огибающая радиоимпульсов для этого случая обозначена 2. Цель в положении 2 еще больше отклонена по углу места. Тогда начальная фаза огибающей (2 ) остается прежней, но глубина амплитудной модуляции становится больше. Очевидно, что при произвольных координатах цели начальная фаза огибающей находится в пределах от О до 2я. 182 Обобщая сказанное, приходим к выводу, что коническое сканирование вызывает амплитудную модуляцию принимаемых сигналов, причем глубина модуляции возрастает с увеличением угла отклонения цели от равносигнальной оси, а фаза огибающей определяется тем, в каком направлении (по азимуту и углу места) произошло это отклонение. Коэффициент амплитудной модуляции принимаемых радиосигналов m = UJUgm, где Um - амплитуда переменной составляющей огибающей; fom -среднее значение амплитуды. --2 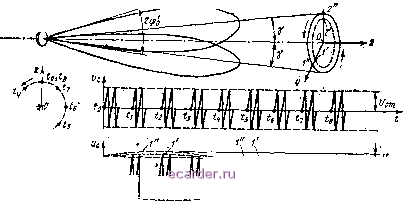 3 шм&£МЖЖ -1 Рис. 7.11. Изменения амплитуды радиосигналов в процессе конического сканирования. Чтобы выявить, на какой угол отклонилась цель от РСН, измеритель должен реагировать на коэффициент модуляции. 47.2. Функциональная схема (рис. 7.12). Система АСН состоит из пеленгационного и исполнительного устройств. Пеленгационное устройство, содержащее антенну, приемник и угловой дискриминатор, измеряет угол рассогласования между направлением на цель и РСН. Приемник стробируется по дальности импульсами системы АСД, чтобы АСН происходило только от радиоимпульсов сопровождаемой цели. Пиковый детектор сигнала ошибки выделяет их огибающую. Усилитель сигнала ошибки содержит в качестве нагрузки колебательный контур или двойной RC-MQCT, настроенный на частоту сканирования Рек- В результате сигнал ошибки, поступающий от усилителя к фазовым детекторам, фильтруется в виде rapMOHHj ческого напряжения со с угловой частотой Qcb = 2лок. амплитудой f/om и начальной фазой со = f/cmsin (QoJ + t)). (7.8) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 [29] 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||