
|
| |
|
Слаботочка Книги 45°, а при винтовом может быть значительно больше. Винтовой и спиральный обзоры применяются в режиме поиска цели, а коническое сканирование совершается в режиме автоматического слежения за целью. К коническому сканированию проще перейти от спирального обзора, чем от винтового. Зигзагообразный обзор (рис. 1.10, е) означает колебательное движение луча по азимуту или углу места с постепенным изменением его 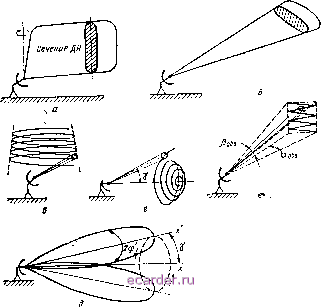 Рис. 1.10. Виды радиолокационного обзора плоским и игольчатым лучами. положения по другой угдавой координате. Такая траектория луча выгодна тем, что позволяет устанавливать секторы обзора независимо по азимуту и углу места. Кроме последовательного и параллельного, существует смешанный обж>р, при котором несколько лучей сразу охватывают зону обзора по одной угловой координате, а по другой совершается последовательное круговое сканирование, как в панорамных РЛС. Параллельный и смешанный виды обзора будут рассмотрены при изучении многолучевых РЛС. 5.4. Требования, предъявляемые к системе радиолокационного обзора. а) Период обзора Тобз должен быть минимальным. Это требование имеет существенное значение при последовательном обзоре, когда облучение любого элемента зоны повторяется лишь через интервалы Тобз , важно, чтобы за период о&ора цель не успела значительно изменить свои координаты, так как тогда отметка цели прыгает по экрану индикатора или, что еще хуже, цель вовсе проходит незамеченной через зону обзора РЛС. б) Облучение цели за один цикл обзора должно быть достаточно длительным, чтобы энергия отраженного сигнала превысила энергию помех, и тем самым обеспечивалось уверенное обнаружение цели; это требование противоречит первому и потому удовлетворяется компромиссно. в) Устройство сканирования должно быть механически простым и надежным в эксплуатации, что вынунодает в ущерб направленным свойствам антенны уменьшать размеры и вес ее вращающихся частей. г) Метод обзора должен быть согласован с требуемой точностью измерения угловых координат. Ясно, что перечисленные требования удовлетворяются по-разному в РЛС различного назначения. Допустим, что зона обзора ограничена углами аобя по азимуту и Роёа по углу места при ширине луча антенны, равной соответственно 2{рд 5 и 29q g. Отсюда находим число элементов зоны обзора как частное от деления обз Робз на 2ф5-2Эо5. Так как в каждом элементе можно зафиксировать не более одной точечной цели, то минимальный период обзора равен Тобя мин = ТоСлаобзРобзфв 2во 5, где Тобл длительность облучения точечной цели. В реальных условиях период обзора больше, чем Тбз мин, В связи С необходимостью замедлять движение антенны при резком изменении траектории луча и затрачивать дополнительное время на переход его из конечной точки траектории в исходную. Это учитьшается коэффициентом реверсирования k, который показывает, во сколько раз фактический период обзора Т, больше идеализированного Togg: Тобз = обз мин = ЙрТобл обз Робз/Зфо.б 20,5. (1.15) Эта формула, которая будет исследована при выборе тактико-технических данных РЛС различного назначения, определяет период обзора пространства антенной, но не время обнаружения Твв всех целей, имеющихся в зоне обзора РЛС. Обычно Тоби > Тобз- Например, обзор по дальности совершается практически мгновенно, а последовательная обработка сигналов по диапазону дальности длится конечное и подчас значительное время. § 6. Из истории развития рздио/юкации Идея радиолокации возникла задолго до ее реализации. Достаточно сказать, что уже в 1897 г. во время опытов радиосвязи на Бал-тийсксий море изобретатель радио А. С. Попов обратил внимание на то, что когда между кораблями Европа и сАфрика оказался третий корабль Лейтенант Ильин , связь первых двух была нарушена. А в отчете об этих опытах упоминалось характерное для радиолокации явление вторичного излучения радиоволн. Радиолокация - высшее достижение радиотехники. Изобретению РЛС предшествовали десятки лет упорных исследований в различных областях физики и радиотехники. Главным стимулом к исследованиям явилась необходимость создания эффективного средства раннего обнаружения самолетов противника, так как применявшаяся для этого звуколокация уже к 30-м годам стала непригодной из-за возросшей скорости самолетов. Ученые Ю. Б. Кобзарев, П. А. Погорелко и Н. Я. Чернецов первыми (1935 г.) разработали импульсную РЛС с электронно-лучевым индикатором и за изобретение прибора для обнаружения самолетов были удостоены Государственной премии. Трудно переоценить значение радиолокации во второй мировой войне. РЛС дальнего обнаружения позволяли подготовить боевые средства противовоздушной обороны к отражению нападения самолетов противника. Станции орудийной наводки обеспечивали прицельную стрельбу по воздушным целям и автоматическое сопровождение их зенитными орудиями. Специальные наземные РЛС независимо от погоды и времени суток помогали наведению истребителей на самолеты противника. Дальнейший поиск и прицеливание осуществлялись с помощью бортовых РЛС истребителей. Бомбардировщики оснащались радиолокационными бомбоприцелами, благодаря .чему резко повысилась точность бомбометания. Радиолокация нашла широкое, применение и в других родах войск. После войны развитие радиолокации не только не приостановилось, а продолжалось в широких масштабах. Это объясняется, во-первых, тем, что радолокация оказалась очень грозным оружием и возникла необходимость в противорадиолокационных средствах. Потребовалось дальнейшее совершенствование РЛС, а это, в свою очередь, способствовало развитию противорадиодокационной техники т. д. Во-вторых, появление реактивных самолетов поставило . перед радиолокацией новые задачи. Так, в результате огромных скоростей реактивных истребителей затруднилось ведение воздушного боя пилотом без помощи бортовой радиолокационной станции. Антенна РЛС перехвата и прицеливания размещается в носовой части самолета и, качаясь в определенном секторе, облучает свою переднюю полусферу. По показаниям индикатора летчик обнаруживает цель, направ- ляет на нее истребитель и станция переключается в режим автоматического сопровонодения. Координаты и относительная скорость цели наряду с другими данными автоматически вводятся в счетно-решающее устройство, которое производит все расчеты, необходимые для точного прицеливания. Результаты расчетов отображаются на экране ндйкатора РЛС и оптическом прицеле, сопряженных между собой. По этим данным пилот истребителя в нужный момент открывает огонь. В-третьих, интенсивное развитие радиолокации сопровождалось широким применением ее в гражданских целях. На воздушных и , морских кораблях, а также в соответствующих портах радиолокация - незаменимое средство навигации. На базе радиолокационной техники возникла новая наука - радиоастрономия, которая исследует небесные тела не только по их собственному радиоизлучению, но и специфи- ческими методами радиолокации. Огромные достижения в исследовании космического пространства немыслимы без применения радиолокации. В-четвертых, изобретение электронных вычислительных машин позволило автоматизировать обработку радиолокационных сигнаЛбв и значительно расширить возможности радиолокации, Последние годы ознаменовались принципиально новым подходом к теории и технике радиолокации: аппарат математической статистики и теории информации положен в основу исследований оптимальных методов приема и обработки радиолокационных сигналов. Найдены новые перспективные направления радиолокации. Разработаны эффективные средства повышения надежности и помехозащищенности радиолокационных станций, уменьшения веса и габаритов радиолокационной аппаратуры, использования в радиолокации когерентных электромагнитных колебаний. На смену независимо работающим РЛС приходят комплексы из разнесенных групп радиолокационных станций, автоматизированных устройств обработки поступающей от них информации и средств связи для передачи выходных данных от устройств обработки к системам радиоуправления и радионавигации.. Глава 2. ОЁНАРУЖЕНИЕ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ § 7. Общие принципы обнаружения сигналов Прежде чем расшифровать (декодировать) параметры радиолокационных сигналов, нужно сигналы обнаружить, но этому препятствуют помехи. 7.1. Функциональная ххема обнаружителя импульсных сигналов. Эта схема показана на рис. 2.1, а соответствующие диаграммы изображены на рис. 2.2 - применительно к идеализированному случаю отсутствия помех и на рис. 2.3 - с учетом помех. Обратимся к рис. 2.1 и 2.2. Синхронизатор вырабатывает остроконечные импульсы щ с периодом следования Тс- Эти импульсы используются для запуска передатчика и в качестве опорных сигналов дальности, т. е. для запуска электронных часов, измеряющих время запаздывания отраженного или ответного сигнала. Зондирующие радиоимпульсы передатчика Иг имеют несущую частоту /о. длительность Ти и ту же частоту следования Fo= 1/То, что и синхронизирующие импульсы 1, В импульсной РЛС излучение и прием радиоволн происходят в разное время. Это позволяет с помощью сравнительно простого автоматического антенного переключателя использовать одну антенну для передачи и приема. . Работа переключателя подробно освещается в курсе Антенно-фидерные устройства . Здесь же ограничимся замечанием, что антен- ный переключатель образован искровыми разрядниками, которые помещены в резонаторы, настроенные на несущую частоту /о- При появлении мощных зондирующих импульсов разрядники пробиваются; в связи с этим закрывается вход приемника и импульсы передатчика беспрепятственно поступают в антенну. В остальное время антенна принимает отраженные или ответные сигналы, мощности которых недостаточно, чтобы пробить разрядники. Поэтому они направляются переключателем к приемнику, а в передатчик не проходят. Лщтиа сигнал вальншт.tti Антенный чатель fJepe-ватчик Hi Синхронизатор Сиесителб ГетераЗин Приемник (линейная тспн) Устрааетва пфаЛтт сиеналаВ (mS) 1-й канал Рис. 2.1. Функциональная схема обнаружителя радиолокационных сигналов.
В реальных условиях антенный переключатель не обеспечивает абсолютного запирания приемного канала и, как показано на временной диаграмме входного напряжения Из приемника, на вход его проникает малая доля энергии зондирующего импульса. Время запаздывания отраженных сигналов /дь /д2 соответствует дальности целей Д, = ct\l2 и Дз = сд2/2. Приемник выполнен по супергетеродинной схеме. За усилителем радиочастоты (УРЧ) следует смеситель с отдельньм гетеродином, на выходе смесителя получаются преобразованные из сигналов з импульсы 4 промежуточной частоты / р. Схема автоматической подстройки частоты (АПЧ) воздействует на гетеродин, чтобы разность между частотой гетеродина и несущей частотой радиосигнала поддерживалась равной номинальной промежуточной частоте. Линейная часть приемника заканчивается усилителем промежуточной частоты (УПЧ) со схемой автоматической регулировки усиления (АРУ). Напомним, что детектор смесителя линейный каскад с переменными параметрами, в нем соблюдается прямая пропорциональность между амплитудами выходного напряжения промежуточной частоты и входного напряжения несущей частоты. Поэтому детектор отнесен к линейное части приемника. Вндеодетектор (ВД) выделяет огибающую импульсов промежуточной частоты - видеоимпульсы в, по которым измеритель дальности определяет время запаздывания дь Д2, 26 а измеритель направления - другие параметры обнаруженных сигналов, характеризующие угловые координаты целей. Если бы не было помех, то, как видно из рис. 2.2, ничто не препятствовало бы выявлению слабых сигналов и измерению их параметров. В связи с наличием помех введено устройство обработки сигналов (УОС), включенное по одну или по обе стороны от видеодетектора, Зон&ирующие атульсь/ Отраженше импульсы 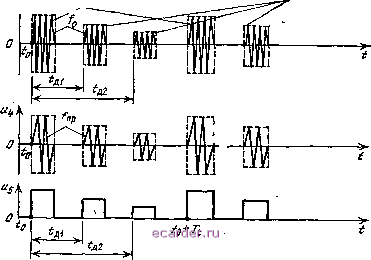 Рис. 2.2. Временные диаграммы напряжений в импульсной РЛС в отсутствие шумов и помех. Обычно додетекторную часть УОС (на рис. 2.1 она обозначена через ДДОС) и видеодетектор относят к приемнику, а последегекторную часть (ПДОС) - к выходному устройству РЛС. Видеоусилитель можно считать нешумящнм линейным каскадом, он не изменяет отношеряя сигнал/шум. Поэтому подразумевается, что видеоусилитель входит в понятие вндеодетектор . 7.2. Последовательное, оараллельное и последовательно-вара*-дельное обнаружеиие т-наяов. Если разделить обьем зоны обзора Тобз = (Дмакс - Дмин) обз Робз на разрешаемый объем ДУ ин= 1 2 [3] 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||