
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [30] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 За счет различия в дальностях и размерах целей динамический диапазон принимаемых сигналов очень велик. Если допустить такие изменения в амплитуде сигнала ошибки, то система АСН будет очень медленно реагировать на слабые сигналы и, наоборот, возбуждаться от сильных сигналов. В связи с этим наряду с АРУ приемника применяют нормировку напряжения Мсо с помощью инерционной схты АРУ усилителя сигнала ошибки. В этом усилителе АРУ изменяет коэффициент усиления в обратной пропорции к среднему значению сигнала ошибки. системы АСД \ 1 Лриемник Детектор сиенала оитдки Фазовый ветектор Усилитет сигнала oiuuSku Цепь обратной связи Усилители Штройство первват ванных Двигатель по углу места /вуктор
Д(1ига/тяь . сканирдвакая Антенна Фазовый ветектор Усилители Двигатель по азимуту ffUHan вгимута Цепь ойратной связи Ревуктор S/стрсйство 7vu. вСРП Рис. 7.12. Функциональная схема системы АСН с коническим сканированием. Далее следуют фазовые дискриминаторы (детекторы). Их два, так как согласно формуле (7.8) сигнал ошибки Мсо выражается полярны-ми координатами i/em и а для изменения РСН антенны требуются отдельные каналы с электродвигателями по азимуту и углу места; требуемый переход к прямоугольным координатам совершается отдельными дискриминаторами азимутального и угломестного каналов. В фазовом детекторе сигнал ошибки перемножается с опорным сигналом, а затем их произведение усредняется. Генератор опорных напряжений - триггер, который управляется импульсами индукторов, расположенных на одном валу с двигателем сканирования. Это обеспечивает равенство частот опорного напряжения и сканирования QoK- Кроме того, предусматривается фазовый сдвиг опорных напряжений по азимуту а и углу места и на я/2: *оп а и стоп sin Оси = оп m COS Оси (7.9) Перемножение сигнала ошибки со ветствующим опорным сигналом дает а = ст Uon т 51П (ск + l) sin Qck == m = cm t/on m sin (Qck + ) COS Qck = f/cmSin (QcK -f CCOOT- (J cm и опт 2 [sinil)-i-sin(2Qc /-i-)]. в результате усреднения, производимого /?С-фильтрами нижних частот фазовых детекторов, вторые слагаемые исчезают и на выходе детекторов получаются управляющие напряжения по азимуту и углу места вида f/y P, = 0.5i/, f/o costf; (7.10) = 0,5i/c UoumSin. (7.11) Как было сказано, начальная фаза!]) зависит от направления на цель. Если цель отклонилась от РСН только по азимуту, то if = О и управляющее напряжение имеется лишь в азимутальном канале (упр а = 0,5f/cmfonm; fynp м=0). при отклонении цели ог РСН только по углу места получаем Ij) = я/2, f/y p О и t/y p = 0,5UomUou т. Исполнительное устройство устраняет рассогласование между направлением на цель и РСН антенны с помощью изменения РСН. Оно состоит из усилителей управляк)щих сигналов, электродвигателей и цепей коррекции. Обычно усилитель напряжения электронный. Усилитель мощности при использовании в угломере двигателя постоянного тока - электромашинный, а двигателя переменного тока - магнитный. Так как луч антенны автоматически следит за целью, то данные о направлении луча, снимаемые с выхода исполнительного устройства, являются выходными данными всего следящего угломера. Они передаются в счетно-решающий прибор (СРП). 47.3. Коммутаторный фазовый детектор. Векторомерный фазовый детектор, балансная схема которого описана в § 11, обычно используется на высоких частотах, а для следящего угломера с коническим сканированием более пригоден коммутаторный фазовый детектор. Примером такого рода дискриминатора может служить фазовый детектор системы АСН станции РП-1 (рис. 7.13). Прямоугольные опорные колебания коммутируют (отпирают и запирают) лампы детектора Л1-Л4 и этим резкб изменяют их параметры. Пеленгационные характеристики пеленгаторов с коммутаторными и векторными фазовыми детекторами существенно не отличаются. Сигнал ошибки подается на-сетки, а опорные напряжения - на аноды ламп Л1-Л4. Электроды этих триодов соединяются так, чтобы соблюдались следующие равенства напряжений: Ugi = Ug; ai = аз и Маг = ai- Подводятся опорныс напряжения g2 Ч 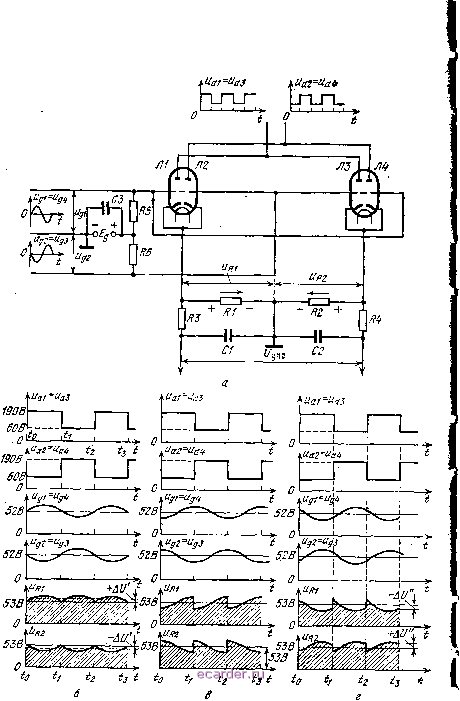 Рис. 7,13. Принципиальная схема (а) и временные диаграммы напряжений (б -г) , коммутаторного фазового детектора,/ К анодам детектора от разных ламп триггера, и когда напряжение Mai == аз- максимальное (190 В*), напряжение Ыаг - а4 - минимальное (60 В), и наоборот. Что касается сигнала ошибки, то он подается на детектор в противофазе. Кроме того, на сетки поступает напряжение смещения Eg = +52 В. Катодные токи вызывают на резисторах R1, R2 падение напряжений uri, ur2 со встречной полярностью. Пульсация выходного напряжения детектора сглаживается фильтрами низших частот R3, С1 и R4, С2. Когда сигнала ошибки нет, к сеткам всех ламп приложено напряжение +52 В, и в тех триодах, на аноды которых подано 190 В, имеются катодные токи, выделяющие на каждом из резисторов R1, R2 напряжение +53 В. Значит, разность потенциалов между сетками и катодами данных ламп равна -1 В, й этого достаточно, чтобы другая пара триодов (Л1, ЛЗ или Л2, Л4), на аноды которых подано 60 В, была заперта. В таком случае выходное напряжение Vy == ri - - ur2 = 53 - 53 = 0. В следующий полупериод сканирования лампы меняются ролями (анодные напряжения изменились на обратные), но выходное напряжение остается равным нулю. Теперь рассмотрим случай, когда сигнал ошибки и опорное напряжение, точнее его первая гармоника, совпадают по фазе (рис. 7.13, б). При этом триоды Л1, ЛЗ отперты в отрезки времени - tu /2 -з, а триоды Л2, Л4- в интервалах ti- t, и так как анодное напряжение отпертых ламп постоянно (190 В), то изменения катодных токов следуют за изменениями сеточных напряжений. В результате во время to- ti падение напряжения Ur\ совпадает по форме cug, а - сыз, тогда как в интервале ti - /2 напряжение иц\ изменяется согласно напряжению Ug, а Ндг - согласно ы,. Очевидно, что под действием сигнала ошибки постоянная составляющая напряжения на R1 стала больше, а на R2- меньше на некоторую величину A.U и выходное напряжение детектора получило приращение 2At/: упр = RI - R2 = (53В + hU)- (53В -AU) = 2Ш. Если между сигналом ошибки и опорным напряжением сдвиг по фазе aj) = 90° (рис. 7,13, в), то при t = t- /1 отперты триоды Л1, ЛЗ, при t = ti~tz - триоды Л2, Л4, при t = tz-tz вновь триоды Л1, ЛЗ и т, д. Получается, что через каждую четверть периода сканирования знак напряжения на резисторах R1, меняется относительно +53В, в силу чего средний потенциал катодов остается равным +53В и выходное напряжение детектора, как это было в отсутствие сигнала ошибки, равно нулю. Индикатор отрегулирован таким образом, что когда цель отклонена от РСН только по азимуту, сигнал ошибки совпадает по фазе с азимутальным опорным напряжением (Ч == 0) и тогда с фазового детектора азимутального канала снимается максимальное управляющее напряжение, как на рис. 7.13, б; в это же время фазовым детектором угломестного канала, в котором г]) == 90°, управляющее напряжение не создается. Обратимся к более общему случаю, когда цель отклонена от РСН и по азимуту и по углу места, образуя в одном из каналов фазовый сдвиг между сигналом ошибки и опорным напряжением, скажем, 120° (рис. 7.13, г). Тогда в первый полупериод сканирования, когда отперты триоды ЛД, ЛЗ, падение напряжения ri определяется сеточным напряжением у, падение напряжения Ндг - напряжением Ugz, а во второй полупериод, когда отперты Л2, Л4, падение напряжения Д1 соответствует сеточному напряжению Ug, а иц2 - напряжению Ugn- В результате постоянная составляющая напряжения оказывается меньше, а ur2 - больше чем Ч-53В на Af/ и выходное напряжение упр = Ri - UR2 = (53-AU ) - (53 ф AU ) = -2AU . Пеленгациотое устройство Нслолнительное устройство в СР,7 Рис. 7.14. Упрощенная структурная схема системы АСН. Итак, по мере увеличения сдвига по фазе от О до 90° между сигналом ошибки и азимутальньш опорным напряжением азимутальное управляющее напряжение уменьшается от максимума до нуля, угломестное - увеличивается от нуля до максимума; если указанный фазовый сдвиг окажется в пределах-90 - /50°, то изменения управляющего напряжения будут противоположными и по абсолютной величине и по знаку. 47.4, Структурная схема системы. Пеленгационное и исполнительное устройства образуют в каждом канале замкнутую систему автоматического регулирования-(рис. 7.14). В этой системе угловой дискриминатор сопоставляет направление цели ф с РСН ф, отработанным следящим измерителем, и определяет рассогласование Дф = ф - ф. Приближенно пеленгационное устройство рассматривают как инерционное звено с постоянной времени Т, которая зависит в основном от параметров /?С-фильтра фазового детектора, а исполнительное устройство - как интегрирующее звено, постоянная времени которого Т у определяется в основном двигателем. Интегрирующие свойства двигателя выражаются в том, что угол поворота ротора двигателя пропорционален интегралу его угловой скорости, которая определяется приложенным к двигателю управляющим напряжением. Обычно в исполнительном устройстве имеется только один интегратор. В связи с этим система обладает памятью по направлению {астатизм 1-го порядка) и при исчезновении сигнала ошибки двигатель и антенна останавливаются. В целом пеленгационное и исполнительное устройства образуют низкочастотное колебательное звено (динамическое звено 2-го порядка). Основные параметры этого звена: собственная частота и полоса пропускания (частота среза) Для мгновенного перехода системы из одного режима в другой и мгновенного приближения луча антенны 188 к центру цели необходимо, чтобы fc- , но при такой полосе пропускания система обсолютно безынерционна и неустойчива и весьма склонна к флуктуанионным ошибкам. Последнее означает, что быстрые флуктуации отраженного сигнала, вызванные поступательным и вращательным движением цели, а при слабых сигналах (больших дальностях) - и внутриприемными шумами, изменяют выходное напряжение фазовых детекторов; это приводит к угловым ошибкам слежения ва целью. Нижний предел полосы пропускания ограничивается тем, что собственная частота fo должна быть по крайней мере в 10 раз больше /с, чтобы избежать сильных собственных колебаний антенны. При большой массе вращающейся части антенны столь большую частоту fo получить не удается. Например, в станции AN/FPQ-6 с 29-футовым рефлектором полоса пропускания fc = 3,5 Гц достигнута ценой снижения отношения fo/fe до трех,а в РЛС с 12-футовыМ рефлектором можно обеспечить fo = 7 - 8 Гц [57]. В таких условиях большую роль играют корректирующие цепи, предназначенные для повышения устойчивости системы АСН без снижения ее быстродействия. На функциональной схеме (см. рис. 7.12) показана параллельная коррекция, охватывающая двигатель и усилитель мощности исполнительного устройства. § 48. Моноимпульсные системы АСН Так как при коническом сканировании сигнал рассогласования формируется из огибающей отраженных радиосигналов, то паразитная амплитудная или фазовая модуляция, обусловленная флуктуациями отражающей площади цели и другими причинами, неизбежно вызывает ошибку сопровождения. Моноимпульсный метод Свободен от такого рода ошибок благодаря тому, что измерение угловых координат этим методом основывается на информации, содержащейся в одном отраженном сигнале (импульсе). Моноимпульсные РЛС, как известно, разделяются на многоканальные амплитудные или фазовые и, кроме того, по способу обработки сигналов - на логарифмические и суммарно-разностные. 48.1. Функциональная схема амплитудной моноимпульсной системы АСН с суммарно-разностной обработкой сигналов. В такой системе упол отклонения цели от РСН определяется по сумме и разности амплитуд сигналов, принятых согласно диаграммам направленности /, , разнесенным на некоторый угол (2yo)- Функциональная схема системы, относящаяся к азимутальному каналу, показана на рис. 7.15. Диаграммы /, получаются с помощью облучателей /, , фазовые центры которых смещены в противоположные стороны от фокуса F и фокальной линии рефлектора. Эти диа.граммы пересекаются, образуя равносигнальную плоскость для измерения азимута целей. Очевидно, что облучатели и равносигнальная плоскость угломестного канала должны располагаться пепендикулярно соответствующим элементам азимутального канала. Линия пересечения равносиг- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [30] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |