
|
| |
|
Слаботочка Книги новые генераторы: твистроны и митроны. Твистроны приближаются по импульсной мощности к клистронам (5 МВт), а по широкополос-ности они превосходят и клистроны, и ЛБВ: в них полоса пропускания 15% против 8% у лучших клистронов и против 10% в ЛБВ. Митроны работают в непрерывном режиме, развивая мощность до 500 Вт при к. п. д. около 70%. Важно и то, что габариты митронов, приходящиеся на каждый ватт генерируемой мощности, значительно меньше, чем других генераторов СВЧ 142, ч. 1]. Антенно-фидерное устройство. Это устройство включает в себя собственно антенну, антенный переключатель и систему управления диаграммой направленности. Антенна формирует диаграмму, а переключатель подключает антенну к передатчику на время излучения волн и к приемнику в остальное время.
Рис. 8.2. Импульсы, просачивающиеся через разрядник защиты приемника. Автоматическая коммутация осуществляется газовыми разрядниками с резонаторами. Мощный радиоимпульс передатчика вызывает пробой разрядника, сопровождающийся просачиванием в приемник короткого импульса - пика / (рис. 8.2), длительность которого не должна превышать 0,01 длительности зондирующего импульса. За пробоем следует деионизация разрядника, и пик / сменяется плоской частью 2. Чтобы не повредить приемник,- уровень плоской части должен быть по крайней мере на 60 - 70 дБ ниже уровня импульса передатчика (33. Система управления антенной (рис. 8.1) обеспечивает обзор пространства по заданному закону и сопровождение целей по направлению. В состав системы входят механизмы вращения по азимуту и наклона по углу места, а в случае автосопровождения методом конического сканирования - и механизм вращения облучателя или рефлектора антенны. Данные углового положения антенны с помощью датчиков, механически связанных с антенной, передаются в выходные устройства РЛС. Приемник РЛС должен иметь минимальный коэффициент шума Ш, чтобы как можно меньше ограничивать прием слабых сигналов. Полосу пропускания приемника обычно согласовывают с шириной спектра принимаемых радиосигналов. Радиолокационные приемники выполняются по супергетеродинной схеме, как на рис. 8.1, но находят применение и широкополосные приемники прямого усиления. Малошумящий усилитель радиочастоты (УРЧ) снижает коэффициент шума приемника и этим повышает его чувствительность. В настоящее время УРЧ радиолокационных приемников выполняются на металлокерамических триодах, лампах бегущей волны, тун- нельных диодах, а также как параметрические (на полупроводниковых диодах) и квантовые усилители. Из них наименьший коэффициент шума имеют квантовые усилители (Ш=1,03-1,18), а наибольший - триод-ные усилители (Ш=1,5 -- 3 на метровых волнах) [43]. Преобразователь частоты содержит смеситель на электронной лампе, транзисторе (обычном или полевом), полупроводниковом диоде или варакторе и гетеродин, выполненный на лампе, транзисторе, клистроне или туннельном диоде. Основные требования к преобразователю частоты: минимальный коэффициент шума, максимальный коэффициент преобразования и минимальный уход частоты гетеродина. УПЧ осуществляет основное усиление и избирательность. Число каскадов УПЧ достигает десяти при общем коэффициенте усиления порядка 10*- lOflS]. Полосу пропускания УПЧ нередко устанавливают шире оптимальной в связи с нестабильностью частот передатчика и гетеродина. Видеодетектор (амплитудный детектор) является детектором огибающей. Видеоусилитель усиливает выходные импульсы детектора, чтобы после передачи по кабелю они нормально воспроизводились выходным устройством. Системы перестройки частоты, УПЧ и АРУ. Согласно функциональной схеме перестройка несущей частоты передатчика производится механически. Импульсы передатчика через аттенюатор поступают в систему АПЧ, которая при перестройке вырабатывает сигнал ошибки, корректирующий частоту гетеродина. В результате промежуточная частота автоматически поддерживается номинальной. Аналогично действует АПЧ при произвольном уходе частоты передатчика или гетеродина приемника. Автоматическая регулировка усиления охватывает каскады УПЧ. Кроме инерционной АРУ, применяются: БАРУ - для защиты приемника от перегрузки импульсными помехами большой длительности; МАРУ - для расширения динамического диапазона приемника посредством логарифмической амплитудной характеристики; ВРУ - для защиты приемника от перегрузки импульсами передатчика и импульсами, отраженными от близкорасположенных к РЛС объектов; ШАРУ - для автоматической регулировки усиления по шумам. Схемы АРУ своими входом и выходом соединяются с УПЧ. Кроме того, для ВРУ и ШАРУ подводится импульс запуска. Выходные устройства. Любой из трех видов выходных устройств - индикаторное, автоматическое непрерывного и дискретного действия - может быть использован в некогерентной РЛС. Автоматическое устройство обычно дополняется индикаторным. К каждому из них подводятся видеосигналы от приемника. Кроме того, на ЭЛТ индикаторов дальности подаются напряжения с каналов развертки и масштабных меток дальности. Эти каналы запускаются импульсами синхронизации. К индикаторам угловых координат также подводятся соответствующие напряжения развертки и электронных меток. Генераторы угловой развертки управляются датчиками углового положения луча антенны. Автоматическое выходное устройство непрерывного действия обеспечивает АСД и АСН, На вхоД системы АСД поступают видеосигналы целей и как опорные для отсчета дальности импульсы синхронизации. С вцхода АСД снимаются непрерывные напряжения дальности и скорости цели. Кроме того, АСД вырабатывает строб-импульсы для отпирания селектора дальности на время приема сигналов сопровождения цели. Эти сигналы проходят в систему АСН, к которой подключен генератор опорных напряжений, связанный с механизмом вращения облучателя (рефлектора) антенны. Выходные напряжения системы АСН используются в качестве управляющих для азимутального вращения луча антенны и наклона его по углу места.
Передающий канал
Приемный нанал
к устройству офадотки сигналов Рис. 8.3. Функциональная схема когерентно-импульсной РЛС с задающим генератором опорного напряжения. В автоматическом выходном устройстве с ЦВУ происходит первичная и вторичная обработка информации. Первичной обработке подвергаются данные, заключенные в импульсе синхронизации и видеосигналах приемника и датчиков угловых координат. После вторичной обработки получаются уточненные коды координат и параметров движения целей. В индикаторных устройствах накопителем энергии сигналов служат экраны ЭЛТ; в автоматизированном выходном устройстве непрерывного действия - интеграторы АСД и АСН, а в устройстве дискретного действия - преселектор блока первичной обработки информации. Испытание на порог производится соответственно глазом оператора; схемой перехода от режима поиска к автосопровождению, которая срабатывает от интегрируемого напряжения, когда оно достигает определенного уровня; в выходных устройствах с ЦВУ - пороговым каска- дом преселектора. В некогерентных импульсных РЛС скважность импульсов не менее 50-ти и достигает в максимуме нескольких тысяч. 54.2. Когерентно-импульсные РЛС [33]. В этих РЛС помехоустойчивость и другие показатели улучшаются прежде всего за счет когерентного приема сигналов и применения синхронного фазового детектора. Обратимся к функциональной схеме когерентно-импульсной РЛС, где источником опорного напряжения является кварцевый задающий генератор (рис. 8.3). Задающий генератор Синхрониза-jnop
I -. Частотный ловулятор , Передатчик Выходное устройство дидео--усилитель Смеситель Видео-детектор Оптимальный фильтр Гетеродин Приешик Рис. 8.4. Функциональная схема РЛС с внутриимпульсной частотной модуляцией. .Высокостабильные синусоидальные колебания этого генератора, имеющие частоту порядка 10 - Ю кГц, разветвляются по двум каналам - передающему и приемному. В передающем канале с помощью умножителя / частота колебаний повышается до несущей, затем колебания усиливаются по мощности и одновременно подвергаются амплитудно-импульсной модуляции от модулятора, который запускается синхронизатором. В результате через антенный переключатель в антенну поступает периодическая последовательность мощных радиоимпульсов. Принимаемые радиоимпульсы преобразуются смесителем в импуль сы промежуточной частоты. Непрерывные колебания гетеродина, подводимые к смесителю, получаются умножением частоты колебаний задающего генератора в каскадах , /. Полученные импульсы промежуточной частоты после усиления в УПЧ сравниваются в фазовом детекторе с непрерывным опорным напряжением той же частоты. Поскольку промежуточная частота ниже частоты колебаний гетеродина, то для получения опорного напряжения достаточно одного каскада умножения частоты . Выходное напряжение фазового детектора подвергается обработке по видеочастоте для оптимального выделения сигнала на фоне шумов. Опорное напряжение фазового детектора и зондирующий импульс когерентны, так как они получаются от одного и того же задающего генератора. 54.3. РЛС с внутриимпульсной модуляцией имеют высокие тактические и технические характеристики благодаря использованию в них сложных зондируюгдих импульсов. Функциональная схема РЛС с внутриимпульсной модуляцией показана на рис. 8.4. В передатчике синусоидальные колебания задающего генератора подвергаются умножению по частоте до сверхвысокой несущей и усилению по мощности до десятков мегаватт в импульсе. Импульсный модулятор воздействует на усилитель-умножитель с целью получения радиоимпульсов большой длительности т, а частотный или фазовый модулятор воздействует на другой каскад СВЧ для получения внутриимпульсной модуляции. В качестве генераторов и усилителей СВЧ используются, в частности, лампы бегущей волны и клистронные усилители мощности. В состав приемника входят малошумящий УРЧ,. преобразователь частоты с клистронным гетеродином, УПЧ, оптимальный фильтр, сжимающий импульсы, видеодетектор и видеоусилитель. Видеосигналы приемника поступают в выходное устройство РЛС. Импульсы синхронизатора с частотой следования одновременно запускают импульсный и частотный (фазовый) модуляторы, а также служат опорными сигналами для определения дальности в выходном устройстве. Процесс сжатия импульсов описан в § 17. § 55. Допплеровские РЛС Допплеровские РЛС применяются прежде всего для измерения скорости. Эти РЛС классифицируют по количеству лучей антенны (одно-, двух-, трех- и четырехлучевые), структуре излучения (непрерывное немодулированное, с частотной модуляцией, импульсное), типу измерителя (неследящий одноканальный или мнбгоканальный частотомер, следящий частотомер), назначению (измеритель вектора скорости, скорости и дальности, СДЦ, радиовзрыватель) и по другим менее важным признакам. 55.1. Допплеровские измерители путевой скорости и угла сноса (ДИСС) летательного аппарата (ЛА) [21]. Навигационные элементы полета ЛА формулируются так (рис. 8.5): курсовой угол (КУ)-угол между продольной осью ЛА (курсом) и направлением на север; воздушная скорость V - скорость движения ЛА по курсу; вектор скорости ветра и; линия пути - истинная траектория движения ЛА; путевая скорость W - скорость движения ЛА по линии пути, эта скорость равна геометрической сумме скоростей воздушной и ветра w = v + и; угол сноса а - угол между векторами путевой и воздушной скоростей. Пусть прямоугольная система координат х, у, z жестко связана с ЛА, совершающим горизонтальный полет, причем центр тяжести ЛА совпадает с началом координат О, а вектор воздушной скорости и про-218 дольная ось антенны ДИСС направлены по оси Ох. Луч антенны отклонен от курса ЛА на угол 9 в горизонтальной плоскости хОу и на угол у от этой плоскости. При таком направлении луча радиоволны падают на участок земли L. Радиальную скорость самолета 1)д относительно точки В участка Ь мысленно определяем в два этапа: сначала проектируем вектор w на линию 0D, параллельную прямой А В на земле, и получаем ш=шх Xcos(9-а), а затем вектор w проектируем на линию луча ОВ и находим 1)д = W cosy == W cos (9 -- а) cos у. Этой скорости согласно формуле (3.29) соответствует допплеровский сдвиг частоты: лоп = 2vJX = 2w cos (6 - - a)cosY/L (8.1) Для одновременного измерения путевой скорости w и угла сноса а требуется не менее двух лучей. Рассмотрим основные соотношения, а в дальнейшем (см. п. 55.2) и функциональную схему четырехлучевого ДИСС. 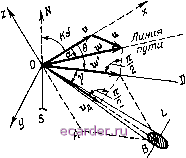 Рис. 8.5. Навигационные полета ЛА, элементы 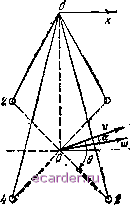 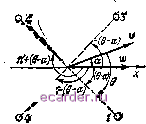 . , ------- она au/Qsami / Рис. 8.6. Взаимное расположение лучей допплеровской РЛС. Расположение лучей в нем симметричное относительно продольной оси самолета Ох (рис. 8.6, а), причем два луча (/, S) направлены вперед, а два (2, 4) - назад. С помощью специального коммутатора поочередно включаются то одна (/, 2), то другая (5, 4) пара накрест расположенных лучей, и принятые ими отраженные сигналы подводятся к приемнику. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 [35] 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||