
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 [36] 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 Выходное напряжение приемника воздействует на следящую систему, которая автоматически совмещает горизонтальную проекцию оси антенны Ох с вектором путевой скорости w, как показано на рис. 8.6, б. Тогда, учитывая, что угол в по-прежнему отсчитывается от вектора v, находим углы между лучами / - 4 и вектором w. Они соответственно равны е - а; я + <6 - а); - (6 - а); я - (9 - а). Формула допплеровского сдвига частоты (8.1) принимает для лучей 1 - 4 вид доп 1 = 12ш cos (9-а) cos уук; f доп2 = (2шсо$1я-1-(9-a)]coSY}A= -[2й; cos (9-а) cos у]А; floij8=={2£iycos[--(9--a)]coSY}A = l2aycos(9--a)cosY]A; f доп4={2£1У cos [я-(9-a)lcos у}А=-l2aycos (9-а) cos у]/к. Как и следовало ожидать, все допплеровские частоты по абсолютной величине равны, но знаки их для лучей, направленных вперед (/, 3) и назад (2, 4), обратные. На выходе приемника, как это предусмотрено схемой, получается напряжение разностной частоты сигналов накрест лежащих лучей - F ~ F (8.3) А/ДОП пптП Fn пош допа ПОПЗ Д0П4 = 14а; cos (9 - а) cos у]/К. Отсюда выявляется Возможность определения путевой скорости w по полученной разности допплеровских частот А/доп W = Af доц/4 cos (О - а) cos Y, , (8 4) а угол сноса летательного аппарата а определяется как угол отклонения оси антенной системы от линий курса. Коэффициент 4 в рмуле (8.4) вместо коэффициента 2 в формуле (8.1) показывает, что четырехлучевое устройство обладает большей чувствительностью и точностью в определении путевой скорости, чем одно-лучевое. До сих пор предполагалось, что полет ЛА горизонтальный. В реальных условиях имеют место продольный и поперечный крены, которые в однолучевом устройстве вызывают большую погрешность измерений, а в четырехлучевой системе эта погрешность почти полностью устраняется при вычитании допплеровских частот. В заключение отметим, что реальный луч антенны облучает на поверхности Земли бесконечно большое число беспорядочно расположенных элементарных отражателей, поэтому фазовые соотношения между отраженными от этих элементов волнами имеют случайный характер. Спектр допплеровских частот получается сложным и флуктуирующим, в связи с чем результаты измерения должны усредняться в течение некоторого времени полета. При усреднении на 20-км отрезке пути достигается снижение вероятностной ошибки определения путевой скорости до ±0,1% и угла сноса до ±0,Г [21].. Чтобы сузить ширину спектра отражений и тем самым уточнить среднее значение допплеровской частоты, стремятся уменьшить облучаемую поверхность земли, для чего уменьшают ширину лучей и уве- лиЧйвакт угол наклона y (рис. 8.5); Так как размер!м самолетных антенн крайне ограничены, то для получения узких лучей (2--6°) в ДИСС используют достаточно высокие несущие частоты (8800- 13 500 МГц). Применение более высоких частот связано с возрастанием потерь энергии радиоволн в атмосфере. Что касается увеличения угла наклона y. то оно связано с нежелательным уменьшением разностной, частоты А/доп [см. формулу (8.3)] и соответственно точности измерения путевой скорости. Угол y поэтому выбирают компромиссно - 65 - 70°. 55.2. Допплеровские РЛС с непрерывным излучением (рис. 8.7) содержат передающее устройство, антенна А1 которого излучает немодулированные колебания радиочастоты; приемное устройство с антенной А2 и приемником, преобразующим отраженный сигнал в колебания допплеровской частоты; измеритель с индикатором результатов измерений допплеровского сдвига JiacTOTbi f дод, например путевой скорости ЛА, на борту которого находится данная РЛС. 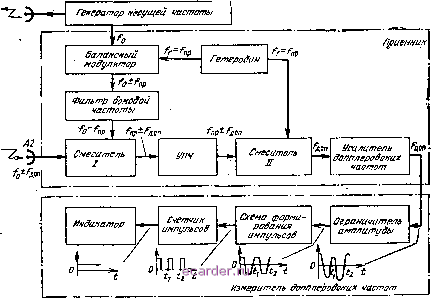 Рис. 8.7. Функциональная схема допплеровской РЛС с непрерывным излучением. Частоту f on можно выявить в первом же каскаде приемника. Это кристаллический смеситель прямого сигнала частотой /ц, просачивающегося через приемную антенну, и отраженного сигнала с составляющими /о ± /доп в спектре. Но тогда приемник окажется малочувствительным, потому что в нем имеются не только тепловые и дробовые шумы, но и мерцательные шумы, вносимые полупроводниковыми и электронными приборами. Мощность мерцательных шумов обратно пропорциональна частоте и именно на низких, в данном случае допплеровских, частотах шумы кристаллического смесителя могут значительно снизить чувствительность приемника.- От этого недостатка свободен супергетеродинный приемник с двумя смесителями (рис. 8.7): в смесителе / получают колебания промежуточной частоты /пр, модулированные по амплитуде с допплеровской частотой f доп, и только в смесителе выделяются колебания частотой f доп (знак в процессе детектирования теряется). Влияние мерцательных шумов ослабляется благодаря тому, что промежуточная частота значительно больше допплеровской. Требуемая когерентность достигается введением, бала некого модулятора, преобразующего напряжения несущей частоты и гетеродина с частотой /г = /пр в напряжение боковых частот / ± /пр. из которых фильтр пропускает к смесителю / только нижнюю (или верхнюю) боковую /о - /пр; к этому же смесителю от антенйы А2 подводится отраженный сигнал, содержащий в своем спектре частоты / ± Роп- результате получаются колебания разностной частоты ((/ ± Fnon) ~ifo - /пр) = /пр ± доп- ПосЛе усиления в УПЧ они перемножаются в смесителе с напряжением гетеродина (/ = /пр), и это дает искомую tдoпплepoвcкyю) частоту (/ р ± /= оп) -/пр = -доп- Очевидно, что так как промежуточная частота /др вычитается, то стабильность гетеродина не влияет на частоту f доц выходного напряжения. За усилителем допплеровских частот следует измеритель этих частот. На функциональной схеме покаан вариант неследящего одноканального измерителя в виде счетчика нулей. В нем колебания допплеровской частоты подвергаются двухстороннему ограничению по амплитуде, затем (в моменты прохождения фронта ограниченных колебаний через нуль) формируются импульсы с постоянной амплитудой и длительностью, которые преобразуются счетчиком в постоянное напряжение, пропорциональное количеству нулей в единицу времени (t = О, ti, ti, ...). Индикатор, питаемый этим напряжением, указывает допплеровскую частоту или другую, пропорциональную ей величину. - Если от допплеровской РЛС требуются данные не только о величине, но и о знаке частоты fдoп (цель приближается или удаляется), то в приемное устройство вводят два канала, отличающиеся сдвигом по фазе опорных напряжений на 90°. Выходные сигналы каналов обрабатываются таким образом, чтобы общий измеритель указывал величину и знак скорости цели [40]. В работе [7] приведены данные допплеровской навигационной станции с непрерывным излучением RYANAY IV: диапазон измерений путевой скорости 92 - 3700 км/ч, скорости сноса ± 555 км/ч, вертикальной скорости ± 300 м/с, ошибка измерения скорости ± 0,9 км/ч; рабочая частота 13 ГГц; мощность излучения 26 Вт; число лучей 3. 55.3. Допплеровские РЛС с импульсным излучением. При построении импульсной допплеровской системы когерентность отраженного и опорного сигналов достигается тремя способами. Два из них, описанные в § 29, применяются в РЛС с внутренней когерентностью, а третий используется в РЛС с внешней когерентностью (такие РЛС иногда называют некогерентными). Обратимся к функциональной схеме ДИСС типа AN/APN-96 США [7] с внешней когерентностью (рис. 8.8). Передатчик, состоящий из синхронизатора, импульсного модулятора и магнетронного генератора, возбуждает некогерентные радиоимпульсы СВЧ с высокой частотой следования = 120-240 кГц, которые поступают через феррито-вый и антенный переключатели в антенну в виде плоской решетки из восьми волноводных излучателей, формирующих четыре луча. Антенна используется и для передачи, и для приема, а ферритовый переключатель обеспечивает поочередное (с частотой 1 Гц) включение то одной, то другой пары накрест расположенных лучей. Он управляется генератором прямоугольного опорного напряжения (ГОН). Антенна стабилизируется относительно вертикальной оси, чтобы в каждой паре лучей волны проходили одинаковые расстояния. Этим Генератор тумоЗ. Лередатчан С!иихрот smop Малульсный мовултор CffHspawop СВЧ
ае§йщий Рис. 8.8. Функциональная схема допплеровской РЛС с внешней когерентностью. И достигается когерентность сравниваемых сигналов. Частота сигнала, соответствующего лзчу, направленному вперед, больше, а соответствующего другому лучу пары, направленному назад, меньше несущей /о на величину допплеровской частоты -Рдоп- Разность этих частот 2f доп должна быть измерена. Балансный смеситель с отдельным гетеродином преобразует радиоимпульсы в импульсы промежуточной частоты, которые после усиления в УПЧ детектируются по амплитуде. Получаются видеоимпульсы с частотой следования F и амплитудой, изменяющейся с частотой 2f доп-Спектр этих видеоимпульсов содержит не только составляющие частотой 2/доп, но и частот Fo и F ± 2f п. 2fc и 2F ± 2F , 3F и 3fc ± ± 2доп, (рис. 8.9), Поэтому усилитель видеоимпульсов должен обладать свойствами низкочастотного фильтра с граничной частотой /гр, несколько большей максимального значения. 2доп, Следящий частотомер, включенный после УНЧ, рассчитан на автоматическое сопровождение цели по скорости. Полоса пропускания измерителя с непосредственным отсчетом охватывает весь диапазон измеряемых допплеровских частот, а поскольку данный частотомер следящий, то он узкополосный и поэтому более помехоустойчив. Результаты измерений путевой скорости w вводятся в цифровой навигационный вычислитель цифровым кодом, благодаря чему отпадают промежуточные преобразования и связанные с ними ошибки. Угол сноса измеряется углом поворота оси антенны, который осуществляется следящей системой, не показанной на функциональной схеме. Станция AN/APN-96, как указано в [7], имеет следующие выходные данные: путевая скорость измеряется в пределах 186- 1860 км/ч с вероятной ошибкой 0,1 %; угол сноса - в пределах ±35° 2F2Fjn 2Fo 2F,2F, f Рис. 8.9. Спектр видеоимпульсов, снимаемых с детектора допплеровской РЛС с внешней когерентностью. С вероятной ошибкой О,Г; несущая частота 8770-8830 МГц; средняя г.гощность 10 Вт; число лучей 4; наклон луча у = 68,4°; высотность устройства 60-21 ООО м. Существенный недостаток станции - потеря информации о знаке скорости цели. § 56. РЛС с непрерывным излучением [40, 83, 9] Непрерывное излучение используется в РЛС допплеровского типа, описанных в § 29, 55, и в РЛС с частотной, шумовой и фазокодовой модуляцией, принцип действия которых также рассматривался. Отметим особенности реализации радиолокаторов с непрерывным излучением. 56.1. РЛС с частотной модуляцией (ЧМ). Остановимся на функциональной схеме (рис. 8.10) самолетного радиовысотомера AN/APN-22 [40] - наиболее употребительной из РЛС с ЧМ. Генератор радиочастоты в совокупности с частотным модулятором создают ЧМ колебания, которые излучаются антенной А1 в пространство. Отраженные сигналы усиливаются, преобразуются и индицируются в приемном тракте с измерительным устройством. К этому тракту относятся приемная антенна А2, балансный смеситель, узкополосный 224 усилитель низкой частоты, ограничитель амплитуды, счетчик импульсов, преобразователь постоянного напряжения в переменное, усилитель и исполнительный двигатель с потенциометром следящей системЬь Балансный смеситель выполнен в виде кольцевого волновода с четырьмя отводами, из которых два входных (а- от приемной антенны, с - от источника опорного сигнала - передатчика) и два выходных Ф, d). Последние подключены к схеме детектирования так, что к диоду Д1 и к диоду Д2 отраженный сигнал проходит равные пути по волноводу (ab = ad = Я3/4), а прямой (опорный) сигнал-с разностью хода kJ2 \cd - cb = - к- -\. Следовательно, на оба плеча детектора прямой сигнал Нпр, р подается противофазно, а отраженный сигнал Мотр, Мотр - синфазно, и когда они складываются, то получаются результирующие колебания Ыр, р с противофазными огибающими (рис. 8.11). Например, в момент /j амплитуда напряжения в плече аЬ Up- максимальная (рис. 8.11, а), а в плече ad Up - минимальная (рис. 8.11, б). В соответствии с этими фазовыми соотношениями (ипр = - - пр. отр = отр) составлена эквивалентная схема (рис. 8.11, в). Огибающая напряжений ир, ир имеет разностную частоту, а наполнение представляет собой ЧМ колебания СВЧ. Детектор смесителя освобождается от ЧМ колебаний СВЧ и выделяет постоянную составляющую с частотой биений. Полярность напряжений на диодах определяется опорным напряжением, так как амплитуда его значительно больше амплитуды отраженного сигнала (рис. 8.10 и 8.11, в). При полярности, указанной без скобок, отперт диод Д1, причем постоянная составляющая тока замыкается по цепи: точка Ь, диод Д1, дроссель Др1, обмотка / трансформатора Тр1, корпус, обмотки gl, aft.При обратной полярности, указанной в скобках, открыт диод Д2 и ток /2 идет в направлении: точка d, диод Д2, дроссель Др2, обмотка , корпус, обмотки gl, ad. Встречные токи ii и 2 индуцируют низкочастотное напряжение на обмотке / / которое в дальнейшем усиливается в УНЧ. Так как огибающие ы и Uh результирующих напряжений Up и Up изменяются в противофазе и с обмотки / снимается разностное выходное напряжение плеч смесителя, то последнее оказывается удвоенным за счет балансного включения. Составляющие СВЧ замыкаются через паразитные емкости € , Сп, а дроссели Др1, Др2 с конденсаторами Сдр, Сдр образуют фильтры, не пропускающие высокочастотные токи в низкочастотный трансформатор Тр1. К этому следует добавить, что главное преимущество балансного смесителя - в подавлении паразитной модуляции. Если имеет место такая модуляция, то амплитуда напряжений на обоих плечах смесителя изменяется синфазно - либо увеличивается, либр уменьшается и при вычитании напряжений м/, и иа паразитная амплитудная модуля--ция подавляется. За смесителем следует усилитель низкой частоты, предназначенный для того, чтобы напряжение биений, полученное в результате детектирования, было усилено до величины, необходимой для эффектив- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 [36] 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |