
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 [37] 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55
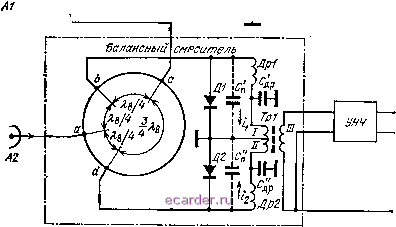 Рис. 8.10. Функциональная схема радиолокационного ного ограничения амплитуды. Частотная характеристика усилителя необычная (рис. 8.12): его коэффициент усиления К с ростом частоты биений должен увеличиваться так, чтобы компенсировать ослабле- 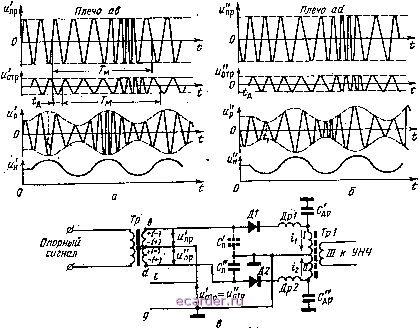 Отраженный сигнал ; Рис. 8.11. Временные диаграммы напряжений и токов в балансном смесителе (а, 6J] и эквивалентная схема смесителя (в) радиовысотомера. ..jmvuff ивгр Lss. ПреодразоЗа- тель напряжения 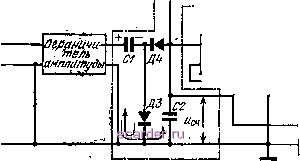 Индшгатор f вь.-соты высотомера с частотной модуляцией. ние отраженного сигнала, происходящее при подъеме ЛА на высоту. Увеличение К происходит до верхнего предела рабочего диапазона частот f после чего усиление резко уменьшают, чтобы сужением полосы пропускания приемника повысить помехоустойчивость высотомера. Ограничитель амплитуды, следующий за усилителем, двухсторонний (рис. 8.10). Назначение его-преобразовать напряжение биений в прямоугольные колебания, амплитуда которых не зависела бы от измеряемой высоты. Счетчик импульсов составлен из двух диодов ДЗ, Д4, дозирующего конденсатора С1 емкостью 100 - 200 пФ, накопительного конденсатора С2 значительно большей емкости (десятые доли микрофарады) и резисторов R3 и R4. Для автоматического слежения по дальности (высоте) в схему введена цепь обратной связи с выходным напряжением Wqc. Допустим сначала, что wос = О и, следовательно, конДенсатор С2 шунтируется только резисторами R3, R4. Тогда положительный перепад выходного напряжения ограничителя от Ыогрмин ДО огр макс вызывает зарядку конденсатора С1 через диод ДЗ до напряжения ормакс (см. сплошные стрелки в счетчике импульсов). Постоянная времени этой цепи значительно меньше длительности самых коротких импульсов и, следовательно, в конце импульса заряд конденсатора С1 равен С/Ыргрмакс- Когда же напряжение ограничителя находится на нижнем уровне огр мин. диод ДЗ заперт, а Д4 отперт, и дозирующий конденсатор С/ 8* 227 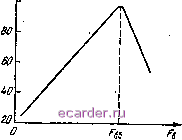 Рис. 8.12. Частотная характеристика УНЧ радиовысотомера. разряжается через выход ограничителя, накопительный конденсатор С2 с параллельно включенными с ним резисторами R4, R3 и через диод Д4 (направление разрядного тока показано пунктиром). На С2 устанавливается напряжение , а на С/ - напряжение огрмин + сч С приходом следующего импульса конденсаторе/ вновь заряжается до напряжения огрмакс и получает заряд С/ ( огрмакс - огрмин - сч) = (т- сч); Одновременно накопительный конденсатор С2 разряжается через R4 -f R3, но так как постоянная времени этой цепи велика, то выходное напряжение счетчика при данной частоте (постоянной высоте полега) уменьшается весьма незначительно. В таких условиях за одну секунду конденсатор С/ приобретает количество электричества FCl {U - сч) и отдает его сопротивлениям R3 + R4,T. е. вызывает в них ток иКРЗ -f R4), равный этому суммарному заряду: Ысч liR3 + R4)== FCl (U - c,). Отсюда F5CHR3+R4)U i+F6C](R3 + R4y Принимая CI = 100 пФ = 10- Ф, R3 + R4 200 кОм = = 2.10 Ом и = 100 Гц, получаем FCl (R3 + = 10 lO-i 2 х X 10* ?= 2> 10 , что значительно меньше единицы. Это позволяет упростить формулу: v - FCl (R3 + R4) U. (8.5) Таким образом, при четкой работе ограничителя (постоянстве Um) напряжение на выходе счетчика прямо пропорционально разностной частоте F опорного и отраженного сигналов, т. е. пропорционально высоте полета летательного аппарата. Теперь учтем автоматическое сопровождение по высоте. В этом режиме постоянное, точнее медленно изменяющееся, напряжение счетчика преобразуется в переменное напряжение бортовой сети, последнее усиливается и в качестве сигнала ошибки приводит во вращение ротор исполнительного двигателя и связанные с ним двилски потенциометров. С одного из потенциометров снимается постоянное напряжение обратной связи Ыо о. действующее навстречу выходному напряжению счетчика е,. Преобразователь введен для того, чтобы усиление производилось не по постоянному, а по переменному току: это дает меньше погрешностей (нет дрейфа нуля) и повышает надежность работы высотомера. Когда состояние автомата высоты соответствует действительной высоте полета, тбк счетчика вызывает на резисторах R3, R4 падение напряжения, которое полностью компенсирует напряжение Ыо с, и на выходе счетчика отсутствует сигнал ошибки (и = 0). С подъемом летательного аппарата частота биений повышается пропорционально вы-соге, на конденсаторе С2 возникает сигнал рассогласования, который усиливается и приводит во вращение двигатель, а от него движок по- тенциометра. Это происходит до тех пор, пока новое значение напряжения обратной связи не сведет сигнал ошибки к нулю. С уменьшением высоты Я сигнал ошибки изменяет знак на обратный и движок потенциометра смещается в обратном направлении. Для каждой схемы счетчика существует максимальный предел частоты подсчитываемых импульсов /б мако при котором счетчик сохраняет высокую чувствительность, а шкала высот еще достаточно равномерная. Этот предел достигается при Н = И,. Тогда высотомер автоматически переключается на другой диапазон высот Н - Hi - Яиа с. в котором напряжение обратной связи Ыо о остается постоянньш несмотря на перемещение движка потенциометра обратной связи, вызванного изменением высоты Н. Согласно формуле- (3.13)частота биений Fq может оставаться равной Fq маке , если с увеличением Н свыше Hi во столько же раз уменьшается девиация частоты Af или частота модуляции / : б макс (8.6) На меньших, чем Н высотах метод автоматического изменения девиации частоты применять нецелесообразно, так как для этого потребовалась бы слишком большая девиация Д/ , тогда как при Н > Н, такой метод не только улучшает работу счетчика, но и повышает отношение сигнал/шум, а сними чувствительность приемника в результате сужения пол осы. пропускания УНЧ и более полного использования ее полезным сигналом. Изменение девиации А/ , обратно пропорциональное измеряемой высоте Н, осуществляется воздействием на частотный модулятор управляющего напряжения Ыу , которое снимается с одного йз потенциометров, связанного с двигателем следящей системы. Одновременно от этой же системы поступают к индикатору данные для индикации высот от я1 до в первом диапазоне (О-Н,) индикация высоты произ- водится по выходному напряжению счетчика. Примером описанного ЧМ дальномера может служить американский самолетный радиолокационный высотомер AN/APN-22, в котором я1 = 60 м и /б мако 6 кГц [40]. 56.2. РЛС с шумовой модуляцией. Согласно функциональной схеме РЛС (рис. 8.13, а) и временным диаграммам (рис. 8.13, б), амплитуда (фаза, частота) непрерывных колебаний и (t) генератора радиочастоты (ГРЧ) изменяется напряжением генератора шума Ыщ (t) с помощью модулятора. Напряжение шума после задержки его в регулируемой линии задержки на время 4 подводится в качестве опорного сигнала ш ( - Q к одному из входов коррелятора. Ко второму входу поступает выходное напряжение приемника и (t). В корреляторе основное пр (О и опорное ш (/ - 4) напряжения перемножаются. Интегратор суммирует их произведение в течение времени наблюдения Т. В результате получается напряжение ы (t), которое измеряется стрелочным или другим выходным прибором. В § 13 было показано, что выходное напряжение коррелятора максимально при условии, что задержка 4 равна времени запаздывания от- Передатчик Генератор шума Uaid) -> Модулятор Линия задержки шИ) р иоррелятор } unp(t) Uui(i-if) Перемножитель Приемник
   Рис. 8.13. Функциональная схема (а) и временные диаграммы напряжений {б) РЛС с шумовой модуляцией. раженного сигнала /д. Следовательно, нужно регулировать задержку в линии до получения максимальных показаний измерителя, и тогда в соответствии с равенством ta= t = 2Д/с определяется дальность цели Д. РЛС с шумовой модуляцией, кроме дальности, измеряет скорости целей. Селекция целей осуществляется с помощью фильтров, составляющих интегратор коррелятора. В качестве первичных источников шумового напряжения применяются тиратроны в магнитном поле, диоды прямого накала и фотоэлектронные умножители. Они генерируют напряжение со сплошным спектром сравнительно низких частот, который трансформируется передатчиком в область СВЧ. Генератор СВЧ может быть однокас-кадным (обычно магиетронный или ламповый) или многокаскадным с усилителем мощности, выполненным на ЛБВ, ЛОВ или митронах. В многокаскадных передатчиках шумовое напряжение Ыщ (О модулирует один из каскадов усиления СВЧ, а автогенератор СВЧ используется одновременно как гетеродин приемника. Качество РЛС в большой мере зависит от параметров линии задержки и коррелятора. Чем больше максимальное время регулируемой задержки в линии, тем меньше ограничивается максимальная дальность действия радиолокатора. Полоса пропускания линии задержки ограничивает ширину спектра шумового сигнала, от которой зависит разрешающая способность РЛС и точность измерения дальности. Линию задержки, отвечающую в полной мере этим двум требованиям, осуществить очень трудно. Наилучшие результаты дает ЭВМ, если на нее возложить функции и линии задержки (в запоминающем устройстве), и перемножителя и интегратора. Широкий спектр частот A/<,j обусловленный шумовой модуляцией, позволяет получить на выходе коррелятора сигнал малой длительности т = 1/А/сп- результате сжатия сигнала повышается его пиковая мощность и достигается высокая помехоустойчивость. РЛС с шумовой модуляцией не имеют ограничений в однозначном определении дальности и скорости целей, которые характерны Для РЛС с частотно-модулированными или другого вида периодическими сигналами. Другие преимущества: простота генерирования шумового излучения; повышенная скрытность работы РЛС благодаря тому, что противнику трудно отличить шумовое излучение от внутренних шумов приемника, а тем более выявить параметры РЛС. Станции с шумоподобными сигналами (например, с фазо-кодо-вой манипуляцией) дают примерно такой же эффект, как радиолокационные станции с шумовой модуляцией, но они проще в осуществлении [40]. Особенно эффективна фазокодовая манипуляция, при которой излучаются шумоподобные сигналы с очень большим произведением ширины спектра на длительность сигнала. 56.3. Сравнение РЛС с непрерывным и импульсным излучением. 1. В импульсных РЛС наиболее просто решается задача разделения передающего и приемного каналов и использования общей антен- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 [37] 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |