
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 [38] 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 ны для передачи и приема. В РЛС с непрерывным излучением прямой сигнал, просачиваясь в приемный канал, перегружает приемник и маскирует слабые сигналы целей. Особенно важно ослабить связь передающего и приемного каналов в допплеровских РЛС, где низкочастотные помехи от вибраций и шумов кристаллических смесителей находятся в диапазоне допплеровских частот. В таких случаях обычно применяют разнесенные друг от друга передающую и приемную антенны. Но только в наземных условиях удается, получить развязку более 80 дБ, а при менее направленных антеннах, применяемых, например, на управляемых снарядах,-как указано в [40}, эта развязка около 20 дБ при Я ~ 30 см и 50 дБ при Я ~ 10 см. 2. В-РЛС с непрерывным излучением опасность пробоя антенно-фидерной системы меньше, чем в импульсных РЛС благодаря меньшей пиковой Мощности. 3. Радиолокаторы непрерывного излучения с ЧМ имеют преиму-liieCT переднмпулйсными РЛС, состоящее в меньших размерах ближней нёпросматриваемой зоны, а допплеровские РЛС с непрерывным излучением этой зоны вовСе не имеют. 4. Из. допплеровских систем наименее пригодны для дальнометрии РЛСс непрерывным излучением. Когерентно-импульсные системы совмещают измерения скорости и дальности целей, в них просто осуществляется развязка передающего и приемного каналов. Недостатки этих систем: наличие слепых скоростей и неоднозначность измерения скорости. 5. В импульсных РЛС отсутствуют анализатор дальномерных частот, требующийся при ЧМ, и анализатор допплеровских частот, необходимый в допплеровских РЛС. Благодаря этому наиболее простой радиолокатор для одновременного наблюдения за несколькими целями - одноканальный импульсный с электронно-лучевым индикатором. 6. РЛС с частотной модуляцией просто и с большой точностью измеряют малые дальности (высоты) одной цели, но они уступают импульсным системам многоцелевой радиолокации, которые требуют сложный многоканальный спектроанализатор и трудно осуществимую линейную частотную модуляцию. 7. В импульсных РЛС с внутриимпульсной модуляцией наиболее успешно, решается проблема совмещения большой дальности действия с большой точностью и высокой разрешающей способностью по дальности, а также с точным и однозначным измерением скорости. § 57. Многолучевые РЛС с механическим сканированием Для параллельного и смешанного обзора требуются многолучевые РЛС. Смешанный обзор производится механическим сканированием с использованием метода парциальных диаграмм(частотно-многоканаль-ные РЛС) или V-луча, а параллельный (мгновенный) обзор - электронным сканированием с помощью многоэлементных антенных решеток. 57.1. Метод парциальных диаграмм. Антенна частотно-многоканальной РЛС имеет вид параболоида вращения, который облучается не-232 , сколькими рупорами, расположенными в один ряд (рис. 8.14). Рупор 1 находится в фокусе параболоида, и этому рупору соответствует Диаграмма /, ось которой совпадает с осью рефлектора. Остальные рупоры (2, 3, 4) смещены из фокуса, и чем больше это смещение, тем больше отклонены от оси рефлектора соответствующие им диаграммы (2, 5, 4). Результирующая диаграмма получается узкой в горизонтальной плоскости и широкой (веерной) в вертикальной плоскости. Каждый облучатель /, 2, 3, 4 .. связан через соответствующий антенный переключатель АП4, АПЗ, АП2, АП1, ... со своим приемопередающим каналом, работающим на одной из несущих частот Д, /j, /3, ... 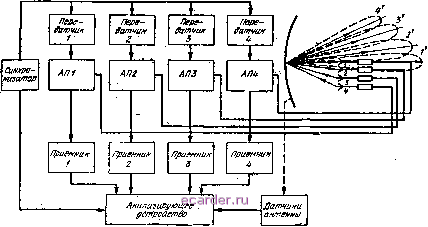 Рис. 8.14. Функциональная схема частотно-многоканальной РЛС. В приемных трактах происходит обработка сигналов, после чего они анализируются для определения координат целей. Антенна вращается вокруг вертикальной оси, совершая смешанный обзор: последовательный по азимуту и параллельный (т. е. всеми лучами одновременно) по углу места. Анализатор выявляет, в каком канале обнаружена цель и каковы ее координаты, причем угол места определяется грубо - по номеру канала и точно - методом сравнения сигналов смежных каналов. Вместо параболической антенны можно использовать сферическую линзу Люнеберга с несколькими облучателями, расположенными н а поверхности линзы. Каждому облучателю соответствует свой луч 18, т. 2]. Наличие каналов и парциальных диаграмм придает многоканальным РЛС следующие достоинства. 1. Мощность излучения РЛС возрастает за счег суммирования мощностей передатчиков и увеличения усиления антенны (парциальной диаграмме, поскольку она острее, чем результирующая диаграмма, соответствует больший коэффициент усиления). . 2. В меньшей мере сказываются ограничения предельной мощности волноводного тракта, так как она распределяется между п каналами. 3. Перераспределением мощности между облучателями можно сформировать специальную диаграмму направленности. 4. Парциальные диаграммы острые, и поэтому угловые координаты целей измеряются с повышенной точностью. Недостаток метода - усложнение аппаратуры за счет многоканаль-ности и применения метода сравнения сигналов при точном измерении угла места. ВертикаШьй луч 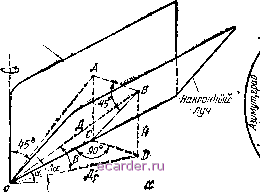 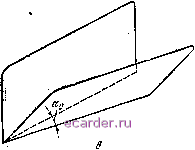 Рис. 8.15. .Лучи антенны (я, в) и экран индикатора с планшетом (б) РЛС, совершающей обзор V-лучом, 57.2 РЛС с V-обзором. Антенная система РЛС формирует два плоских луча; вертикальный и наклоненный под углом 45° к первому (рис. 8.15, а). Обоим лучам соответствуют отдельные тракты, работающие обычно на разных частотах. Антенная система вращается вокруг вертикальной оси и облучает цель сначала вертикальным (точка Л), а затем наклонным (точка В) лучом. По данным канала вертикального луча измеряется дальность Д и азимут а, а по дальности Д и углу поворота лучей антенны от Л до Б определяется высота Н и угол места р цели. Прямоугольник ABCD - квадрат, так как угол между его диагональю и сторонами равен 45°. Значит, CD = BD= Н и, решая прямоугольные треугольники OCD и ODB, можем написать Я = CZ) = 0D sin Да = /ОБ - fiD sin Да = /Д Я sin Да. Отсюда Я = ДsinДa/ Kl+sin2Дa, (8.7) а если внести поправку на кривизну земли, радиус которой 7?з = = 6370 км, то получим формулу Я = Д sin Да / У1 + sin Да + ]Xl2Rg. (8.8) При\ К-обзоре, кроме ИКО, применяется индикатор дальность - азимут-высота (рис. 8.15, б). На экране индикатора от каждой цели получаются две отметки: нижняя Л соответствует вертикальному лучу и верхняя Б - наклонному. По нижней отметке определяются дальность и азимут, а по интервалу между нижней и верхней отметками - высота цели. На малых высотах интервал может оказаться настолько незначительным, что отметки сольются. Во избежание этого лучи антенны сдвигаются на угол = 10° у основания (рис. 8.15, в). Перед экраном индикатора размещается номограмма, на которой нанесены линии равных высот Я = О, 2, 4, ... км (рис. 8.15, б) как функции (8.8) от Д и Да с учетом угла о- Номограмму перемещают по вертикали до совмещения нижней отметки цели с прямой Я=0, и тогда по расположению верхней отметки относительно кривых номограммы определяется высота цели. Все координаты измеряются по методу максимума, и это упрощает схему РЛС. Однако обзор V-лучом дает меньшую, чем при обзоре парциальными диаграммами, точность измерения высот, особенно быстро летящих и очень удаленных целей, и меньшую разрешающую способность по угловым координатам. Кроме того, измерения затрудняются наличием двух отметок от одной цели и необходимостью пользоваться номограммой индикатора. Не следует смешивать эти методы с многочастотной радиолокацией, при которой цель облучается волнами быстро изменяющейся частоты или разных частот одновременно, что, по мнению зарубежных специалистов, очень повышает помехоустойчивость, дальность действия и точность РЛС [40]. § 58. РЛС с многоэлементными антенными решетками [40, 47, 60] Антенны первых радиолокаторов, работавших на метровых волнах, выполнялись в виде решеток синфазных вибраторов. Сканирование осуществлялось механическим вращением антенны. По мере внедрения в радиолокацию дециметровых, а затем сантиметровых и миллиметровых волн антенные решетки все более вытеснялись параболическими и линзовыми антеннами. В последние годы интерес к многоэлементным антенным решеткам необычайно возрос, так как они открывают возможности решения ряда серьезных проблем современной радиолокации и радиосвязи. Для получения узкого луча требуются антенны больших размеров, но это исключает возможность механического сканирования с малым периодом об- зора. Если же применить антенную решетку, то можно составить ее из тысяч - десятков тысяч однородных элементов (волноводных, рупорных и др.), достигнув этим очень высокой направленности; вместе с тем механическое сканирование заменяется электронным, основанным на том, что положение и форма луча в пространстве зависят от амплитудного и фагового распределения полей (токов) в элементах решетки. Для сканирования в одной плоскости достаточно линейной решетки, а для сканирования по двум угловым координатам требуются решетки из элементов, распределецных на плоскости или поверхности шара, 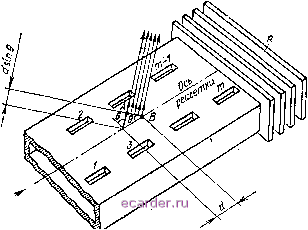 переменной частоты Рис. 8.16. Волноводно-щедевая антенна с последовательным возбуждением ее элементов. цилиндра и Т. д. Основные методы электронного сканирования - частотный и фазовый. Решетки с фазовым управлением называются иначе фазированными антенными решетками {ФАР). 58.1. Частотный метод сканирования рассмотрим на примере вол-ноБОДно-щелевой антенны с последовательным возбуждением ее элементов 1, 2,т волной типа Яю (рис. 8.16). Содного конца волновод подключается к перестраиваемому по частоте генератору, а с другого - к согласованной нагрузке R. Обозначим длину волны в волноводе при произвольной частоте генератора через Я., а при средней частоте диапазона через Jigo- Расстояние между соседними щелями А, - Я,во/2, и если бы они располагались по одной прямой, то при Ji = фазовый сдвиг полей в этих щелях был бы равен 2nd/Jlj,o = я. В рассматриваемой антенне щели располагаются поочередно по обе стороны от средней линии широкой стенки волновода, этим компенсируется фазовый сдвиг я. Как линейная синфазная решетка антенна излучает волны с максимумом, перпендикулярным оси решетки. При изменении длины волны в волноводе от Jigo до сдвиг фаз полей в соседних щелях становится равным (1-1), (8.9) Теперь из соседних щелей волны излучаются со сдвигом по фазе на угол . Но так как фронт волны АВ является гшметрическим местом точек с равной фазой, то максимум излучения при длине волны в воздухе Я должен отклониться хя нормали к оси решетки на такой угол 6, чтобы за счет разности хода лучей d sin 9 от соседних щелей к фронту АВ фазовый сдвиг d sin 6 был равен углу if, выраженному формулой (8.9): Отсюда sine = inG = ?fl-). к\ 2d; л 2d,/ к \ KJ (8.10) Согласно полученной формуле при К < во sin 0 > О и угол 0 > О, при К - Кв 6 = 0 и, наконец, при Я > Яо sin 0 < О и угол 0 < 0. Таким образом, изменение частоты генератора в заданном диапазоне волн сопровождается сканированием диаграммы направленности антенны по обе стороныот перпендикуляра к плоскости решетки. Частотное сканирование требует расширения полосы пропускания антенно-фидерной системы, поэтому оно применяется только при узкополосных сигналах. Кроме того, частотное сканирование ограничивает точность углового сопровождения, так как с изменением частоты облучения несколько изменяются отражающие свойства целей. 58.2. Фазовый метод сканирования. Этот метод отличается тем, что требуемое для сканирования изменение фазового сдвига между токами (полями) соседних элементов решетки достигается перестройкой включенных в систему фазовращателей без изменения несущей частоты сигнала. Фазированная антенная решетка (ФАР) может быть включена по параллельной, последовательной или смешанной схеме питания. В параллельной схеме передатчик и приёмник соединяются с каждым элементом решетки А1, А2, A3, ... через отдельные фазовращатели (рис. 8.17). Система управления обзором должна создавать различные сдвиги (± ф. ± 2ф, ...) в фазовращателях. В последовательной схеме все излучатели отделяются элементами, создающими одинаковые фазовые сдвиги. Смешанная схема питания является сочетанием последовательной и параллельной схем. Примером может служить показанная на рис. 8.18 плоская решетка с комбинированным сканированием и смешанной схе- мой питания: по азимуту сканирование частотное, а питание последовательное через отрезки линии задержки, создающие одинаковые фазовые сдвиги; угломестное сканирование фазовое при параллельной схеме питания. Управление фазовращателями, сдвигающими фазу на [), 2г[), Щ, не зависит от перестройки частоты. Следовательно, сканирование по азимуту и углу места независимое. В параллельной схеме более сложная система управления из-за необходимости создания значительно отличающихся между собой фа- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 [38] 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |