
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 [39] 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 зовых сдвигов, особенно для крайних элементов решетки. Это, естественно, ограничивает скорость сканирования. Вместе с тем параллельная схема имеет свои преимуш,ества: а) более высокий к. п. д. и более высокий уровень допустимого излучения, так как при т фазовраш,ателях через каждый из них проходит только т-я часть общей мощности излучения; б) большая точность сканирования за счет того, что ошибки любого фазовращателя сказываются на работе одного элемента решетки, тогда как в последовательной схеме - и на работе всех последующих. В смешанной схеме меньше сказываются недостатки последовательной и параллельной схем: мощность излучения, к. п. д. антенны и точ- 3f AZ -Рис. 8.17. Фазированная антенная решетка, включенная по параллельной схеме. Рис. 8.18. Фазированная антенная решетка со смешанной схемой питания.  £игнал леремен- Частоты Цф -к. Y Y У - f у ность управления повышаются за счет уменьшения числа последовательно включенных фазосдвигающих элементов, а уменьшение ответвлений от фидера снижает диапазон изменения фазовых сдвигов, производимых фазовращателями, и это позволяет повысить скорость сканирования. Система управления фазовращателями, которая является важнейшей частью ФАР, может быть непрерывной, дискретной или коммутационной. Первая вырабатывает непрерывные сигналы управления, необходимые для плавного сканирования диаграммы направленности. Реализация такой системы при параллельной схеме питания, где на каждый фазовращатель подается отдельный управляющий сигнал, связана с большими трудностями, особенно если решетка многоэлементная. При дискретном управлении каждый фазовращатель рассчитан на фиксированное значение фазового сдвига, например О, л/2, л и Зл/2, вводимого по команде устройства управления обзором. Коммутационное управление наиболее простое (рис. 8.19): указанные фиксированные сдвиги создаются в каждом элементе решетки одинаковыми комплектами нерегулируемых фазовращателей, причем каждый из них вклю-238 чается через отдельный коммутатор. Управляющие сигналы посылаются из вычислительного устройства согласно требуемому закону сканирования. Очевидно, что при дискретном и коммутационном управлении неизбежны фазовые ошибки, так как только при непрерывном управлении можно получить именно те фазовые сдвиги во всех элементах решетки, которые необходимы для точного отклонения луча на заданный угол. Из-за фазовых ошибок расширяется главный лепесток и повышается уровень боковых лепестков диаграммы направленности. Коммутационное управление наиболее простое и поэтому наиболее перспективное, особенно для многоэлементных решеток, потребность в которых растет 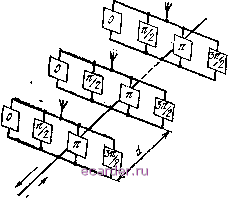 йт передатчика Рис. 8.19. ФАР с коммутационным управлением. V В связи с повышением требований к точности и разрешающей способности РЛС по углам. Так, для формирования луча шириной Г антенная решетка должна содержать 10* элементов, а луча шириной 0,1° - около 10* элементов. Заметим, что даже при точном фазировании решетки ширина главного луча диаграммы направленности изменяется обратно пропорционально cos 6, где 0 - угол отклонения луча от перпендикуляра к решетке. Это можно объяснить тем, что размер решетки, видимый под углом 0, составляет cos 0 от истинного размера. Расширение главного лепестка диаграммы заставляет ограничить сектор обзора углами 100-120° [2]. 58.3. Многолучевые антенные решетки. Рассмотрим принцип формирования многолучевой диаграммы на примере двухэлементной ФАР, работающей в режиме приема (рис. 8.20). Сигналы, принятые элементами решетки, проходят усилители радиочастоты, фазовращатели, создающие сдвиг по фазе ifo, фо- Ai5 и ifo + Ai) (где S.% зависит от угла 00 отклонения луча от нормали к решетке), цепи СЦ1, СЦ2, СЦЗ, где попарно суммируются сигналы с тем или иным фазовым сдвигом, и радиолокационные приемники Прм1, Прм2, ПрмЗ, за которыми следует общее выходное устройство РЛС. 90°
При приеме по лучу Л2, перпендикулярному оси решетки, сигналы, принятые элементами А1, А2 решетки, имеют одинаковый фазовый сдвиг фо, так как проходят к А1 и А2 одинаковое расстояние от цели. Следовательно, улавливаемые лучом Л2 сигналы создают, максимальное напряжение на выходе цепи СЦ2 и приемника Прм2 (канал 2). В направлении лучей Л1 и ЛЗ волны приходят к элементам AI, А2 с разностью хода ± d sin Э , что соответствует сдвигу фаз 2nd sin Gq/X. Чтобы обеспечить прием по лучуЛ1 в канале / и по лучу ЛЗ в канале 3, эта разность фаз компенсируется следующим образом: сигнал задерживается по фа-зе-на между А1 и СЦ1 и на угол фо- Аф между А2 и СЦ1;междуА1 и С1ЦЗ задержка фазы равна ipo, тогда как между А2 и С11,3 задержка равна ipo -f Aij). Выходное устройство РЛС содержит анализатор, который по максимуму выходного сигнала определяет канал и номер луча ДН. Тем самым устанавливается направление на цель; дальность же, как обычно, определяется по времени запаздывания сигнала. Этот принцип распространяется на систему с любым числом п элементов, причем с увеличением возрастаетчисло лучей в диаграмме, каждый из них становится более узким и требуется больше приемных каналов. Принцип построения решетки по обеим угловым координатам одинаковый. На рис. 8.21 показана функциональная схема аналогово-цифровой следящей системы, предназначенной для электронного сканирования луча РЛС. В многоканальный приемник через ферритовые фазовращатели поступают сигналы с элементов AI, А2, A3, А антенной решетки. Выходное напряжение приемника преобразуется из аналогового в цифровое для введения в ЦВУ. По этим данным ЦВУ рассчитывает управляющие сигналы, которые после преобразования из цифровых в аналоговые должны быть поданы в устройство управления фазовращателями. Оно обеспечивает требуемыйзакон сканирования луча. Одновременно информация об угловых координатах сопровождаемых целей поступает в индикатор.
кдыходномр устройству РЛС Рис. 8.20. Функциональная схема формирования трехлучевой ДН посредством двухэлементной ФАР. Основные недостатки мйогоэлементных антенных решеток - относительная сложность и высокая стоимость. Эти недостатки успешно устраняются по мере совершенствования ферритОвых и полупроводник ковых фазовращателей и развития микроэлектроники. Ферритовые фазовращатели особенно эффективны как непрерывно управляемые, а полупроводниковые как коммутационные. Дальнейший шаг в развитии многоканальных РЛС - переход от пассивных антенных решеток к решеткам из активных элементов, выполненных в виде микромодулей. Каждый модуль может быть полным у<1 Устройство р/7ра/9лемия фазовращателями Рреойрааователь код-аналог Лриешик Рреовразсдатель аналог-код Индикаторй/ t Преодразодатель .. код-аналог Рнс. 8.21. Аналогово-цифровая следящая система РЛС с электронным сканированием луча антенны. Приемопередающим трактом с выходным сигналом промежуточной частоты, на которой сигналы, принятые всеми элементами решетки, отрабатываются совместно. Такое решение дает дополнительные преимущества: многократное увеличение мощности излучения, значительное упрощение производства за счет однотипности активных элементов, возможность совмещения в одной системе функций различных специализированных РЛС (наблюдение за воздушными и наземными целями, обеспечение полетов на малых высотах, картографирование ; естности и др.), высокие надежность и помехоустойчивость. Например, в состав самолетной бортовой РЛС типа RASSR, выполненной на твердотельных элементах высокой надежности, входит активная ФАР. Элементами решетки служат 1648 приемопередатчиков, антенных переключателей, фазовращателей и волноводных излучателей, смонтированных в 824 модулях. РЛС рассчитана на работу в различных режимах: картографирование земной поверхности, обеспечение полета в условиях грозовой деятельности и над горной местностью, взаимодействие с радиомаяками и др. Для этого ФАР формирует различные диаграммы направленности: иглообразную, плоскую и косеканс- квадратную. Электронное сканирование производится по фазовому методу с коммутационным управлением. Коммутаторы на полупроводниковых диодах обеспечивают в фазовращателях 4 положения фазы: 45; 22,5; 11,25 и 5,625° [23]. § 59. Оптические локационные системы [52, 57, 66] Изобретение квантовых генераторов (1960-1961 гг.) положило начало оптической локации. Эти генераторы возбуждают монохроматические (одной частоты) когерентные лучи видимого или инфракрасного света. Антеннами оптических локаторов служат системы линз. 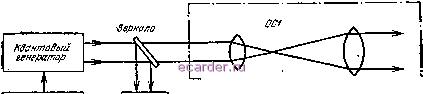 Устроис/пво модуляции ФЭУ1
DCZ Инвинатор дальности Блон измерения запаздывания Усилитель Рис. 8.22. Функциональная схема импульсного оптического дальномера. которые сообщают нужную направленность излучению и приему световых волн. В антенную систему, кроме того, входит сканирующее устройство. Функции приемника выполняет обычно фотоэлектронный умножитель (ФЭУ) с усилителем. Выходное устройство - цифровой индикатор координат и скорости целей. Импульсный оптический дальномер (рис. 8.22) состоит из квантового генератора, излучающего импульсы света с помощью модулирующего устройства; передающей оптической системы 0С1, излучающей в пространство световые импульсы, полученные в генераторе; приемной оптической системы 0С2, улавливающей отраженные импульсы для передачи их в ФЭУ2, который вместе со следующим за ним усилителем составляет приемник; блока измерения времени запаздывания отраженных сигналов относительно опорного сигнала, берущего начало от квантового генератора и усиливаемого в ФЭУ1 после отражения его лучей от полупрозрачного зеркала, и индикатора, показывающего дальность цели в виде высвечиваемой группы цифр. Квантовые генераторы создают настолько короткие импульсы, что точность измерения времени запаздывания, достигает 10 с; это соответствует ошибке измерения дальности около 30 см. Точность фазовых дальномеров оптического диапазона еще выше- менее 5 см. Вторая область применения оптических локаторов - измерение радиальной скорости на основе эффекта Допплера. Здесь большие воз- можности открывает то, что допплеровский сдвиг частоты прямо пропорционален несущей частоте излучения, и так как в оптическом диапазоне волн эта частота больше, чем в радиочастотном диапазоне в десятки тысяч раз, то соответственно выше точность и шире диапазон измерений. Например, один из допплеровских локаторов (США) способен при длине волны лазера 1,153 мкм определять скорость космических кораблей от 0,003 см/с до 8 км/с [63, 64]. Оптическая локация весьма успешно решает чрезвычайно важную задачу высокоточного определения направлений и разрешения целей по угловым координатам. Уже на выходе квантовых генераторов получаются узкие лучи, и оптические системы даже небольших размеров (единицы сантиметров в диаметре) сужают эти лучи до долей угловой минуты. Такая высокая направленность, обусловленная очень малой длиной волны, делает оптические локаторы незаменимыми для наблюдения за низколетящими летательными аппаратами, когда отражение радиоволн от земли резко снижает эффективность РЛС. Лазерная система слежения за ракетой-носителем Сатурн-5 фирмы Sylvania Electroijic Systems обеспечивает на дальности до О км точность углового сопровождения ± 1 [65]. До сих пор речь шла об оптических локаторах со сравнительно небольшой дальностью действия - порядка десятков километров. Но специфические методы квантового генерирования (стимулированное излучение) позволяют в случае необходимости излучать мощности порядка мегаватт в импульсе. Монохроматичность излучения дополнительно повышает спектральную яркость вплоть до того, что она оказываемся больше солнечной в миллионы - сотни миллионов раз. В результате становится возможной активная оптическая локация весьма удаленных целей, например Луны (дальность действия такого локатора должна быть около 400 ООО км). Недостатки оптических локаторов: низкий к. п. д. передатчиков, невысокая чувствительность приемников, зависимость работы от . метеорологических условий, узкие окна прозрачности атмосферы в диапазонах световых и инфракрасных волн и специфические помехи от рассеяния излучения в обратном к локатору направлении. Эти помехи устраняются стробированием приемника по дальности. Другие недостатки пока не устранены, поэтому оптические локационные устройст-. ва применяются только тогда, когда радиолокационные системы не в состоянии обеспечить требуемые точность и разрешающую способность. Оптическая локация требует предварительных данных о местоположении цели, чтобы осуществить беспоисковое слежение (поиск очень узким лучом света связан с большими трудностями). § 60. Средства пассивной радиолокации 60.1. Назначение и особенности пассивной радиолокации. Несколько расширим сведения о пассивной радиолокации, которая, как извест-т, предназначена для получения информации о целях по их собственному (пассивному) радиоизлучению. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 [39] 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |
||||||||||||||||||||||||||||||||||||||||||||