
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 [40] 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 Естественное радиоизлучение может быть тейловогб и нетеплового происхождения. Тепловое излучение создается внутренними электродинамическими процессами в атомах и молекулах всех веществ, температура которых выше абсолютного нуля {-273° С). Нетепловое электромагнитное излучение исходит от любэго радиопередающего устройства и возникает при грозовых и других интенсивных электродинамических процессах. Обе разновидности собственного излучения имеют общие свойства и различия. 1. Мощность теплового радиоизлучения очень мала, а нетеплового- больишя. Это объясняется тем, что спектр частот электромагнитных волн, излучаемых при тепловых процессах, широкий: простирается от инфракрасного (Я. =* 0,76-750 мкм) до сантиметрового диапазона, причем на долю радиоволн (миллиметровых и сантиметровых) приходится менее 1% излучаемой энергии. Что касается нетеплового излучения то оно и более интенсивное и, как правило, же по спектру. Поэтому приемники радиоволн нетеплового происхождения обычно прямого усиления, а теплового происхождения - высокочувствительные супергетеродины., 2. Спектральная плотность теплового излучения максимальна в инфракрасном диапазоне .волн и значительно уменьшается с переходом к миллиметровым и сантиметровым волнам, тогда как нетепловое излучение лучше всего улавливается на низких частотах (ниже 10- 30 кГц). При ядерных взрывах, например, наибольшее излучение наблюдается на частоте примерно 30 Гц [33, 611. 3. Пассивная радиолокация возможна только при- температурной контрастности наблюдаемых объектов, т. е. при различии их яростных температур Т. Яркостная температура-это величина, равная произведению абсолютной температуры тела на коэффициент поглощения данного излучения в окружающей среде. Металлические объекты и покрытия имеют Т < 10-20 К, а факелы ракетных двигателей - Гя == 1500-2800 К [42, ч. 2]. 4. Естественное излучение тел независимо от своего происхождения (теплового или негеплового) беспорядочное; оно, как и внутренние шумы приемника и приемной антенны, флуктуационное. Следовательно, пассивная радиолокация является процессом обнаружения шумо-подобного сигнала на фоне шумов, а это требуег надлежащей обработки излучения (модуляции и квадратичного детектирования с последующим интегрированием - фильтрацией низших частот). 5. Собственное излучение непрерывное и принимается без опорных сигналов. По этой причине одноканальные пассивные РЛС не могут измерять дальность и допплеровский сдвиг частоты. В пассивной радиолокации преимущественно используется тепловое излучение сантиметровых и миллиметровых волн. Отсюда происходит название радиотеплолокация; соответствующие радиолокаторы называются радиотеплолокационными станциями (РТЛС). 60.2. Прием и обработка сигналов в РТЛС. Радиотеплолокационная станция (радиометр) состоит-- из антенного и приемного устройств и оконечного прибора. Для воспроизведения как можно большей ча- сти спектра собственного излучения объектов нужно, чтобы антенное и приемное устройства были весьма широкополосными. В радиометрах применяются параболические, линзовые антенны и антенные решетки с игольчатой диаграммой направленности. Оконечными приборами служат ЭЛТ или более инерционные приборы: стрелочные, самописцы и др. Основные виды приемников РТЛС: компенсационный, корреляционный и модуляционный,.Первые два рассчитаны на оптимальную oia-ботку сигналов, а третий-на неоптимальную. Приемник радиометра компенсационного типа выполнен по супергетеродинной схеме (рис. 8.23). Так как каскады, предшествующие Гетеродин Смеситель УПЧ Детентор Фильтр нижних частот т Уг Усилитель ономпен- сирую-о- N ТУ* л*:, ИП дг Рис. 8.23. Функциональная схема радиометра компенсационного типа. детектору, широкополосные, то очень важно, чтобы они были малошу- мящими. По этой причине УРЧ выполняется на лампе бегущей волны или как мситекулярный усилитель. Среднее значение напряжения шумов равно нулю, и, чтобы наилучшим образом выделить шумоподобный сигнал на фоне собственных шумов радиометра, детектор должен быть квадратичным. Постоянная составляющая его выходного напряжения пропорциональна сумме квадратов напряжений сигнала и мешающего шума. Сигнал обнаруживается по разности выходных напряжений при наличии и отсутствии излучения объекта. Низкочастотные каскады, наряду с усилителем, содержат узкополосный фильтр (интегратор). Чем уже полоса пропускания этого фильтра, тем больше длительность и эффективность интегрирования полезного сигнала на фоне шумов. Для радиометра компенсационного типа характерно также наличие решающего устройства. Оно содержит усилитель компенсирующего напряжения, на вход которого поступает напряжение от генератора шума Нкш; последнее регулируется потенциометром R1. Выход этого усилителя подключен к плечу Р2 мостовой схемы. Остальные плечи моста образованы элементами Д1, R4, Д2, из которых резистор R4 соединяется с выходными зажимами УНЧ приемника. Индикаторный прибор (ИП) введен в диагональ моста с помощью фильтра<3, С. Выходное напряжение приемника детектируется диодом Д2, а компенсирующее напряжение - диодом Д1. Выпрямленные диодами токи, как видно из схемы, проходят через индикатор встречно. С помощью потенциометра R1 добиваются нулевых показаний индикатора в отсутствие полезного сигнала. При этом условии индикатор будет реагировать только на излучение обнаруженного объекта. Нестабильность коэффициентов усиления УРЧ и УНЧ нарушает компенсацию, и тогда нескомпенсированные шумы радиометра воспроизводятся индикатором как сигнал цели. Это ограничивает применение компенсационных приемников несмотря на их высокую чувствительность. Модуляционный приемник (рис. 8.24). Через щель в волноводе, соединяющем антенну А с УРЧ приемника, проходит диск. Часть поверх- Эле/гтро-двигатель Генератор модулирующего напряжения Опорное напряжение Смеситель Детектор Иэдиратель-ный УНЧ Синхронный детектор Гетеродин Индикатор У/7Г Фильтр нижних частот Рис. 8.24. Функциональная схема радиометра с приемником модуляционного типа, ности диска прозрачна для электромагнитных волн, а другая часть поглощает их. Диск вращается электродвигателем, питающимся от генератора модулирующего напряжения частотой 30 Гц. В результате амплитуда шумоподобного сигнала, принятого антенной, изменяется с частотой 30 Гц по прямоугольному или синусоидальному закону в зависимости от формы диска. Это позволяет отделить сигналы от шумов приемника, поскольку последние не модулированы. Разделение начинается после основного детектора в избирательном усилителе, настроенном на частоту полезной составляющей выходного напряжения детектора (30 Гц). Еще большую помехоустойчивость сообщает приемнику синхронный детектор, к которому кроме основного напряжения от УНЧ подводится опорное напряжение от модулирующего генератора. Полезный модулированный сигнал преобразуется синхронным детектором в постоянный ток, который после усиления в УПТ подводится к индикатору. Преимущества модуляционного приемника: относительная простота, надежность эксплуатации и слабое влияние нестабильности усиления (частота нестабильности значительно ниже 30 Гц). Недостаток: снижение выходного эффекта в результате неоптимальной обработки сигнала и поглощения энергии в модулирующем диске. Области применения пассивной радиолокации определяются ее преимуществами и недостатками по сравнению с активной. Преимущества: скрытность работы, меньшие габариты и вес за счет ожутствия передающего устройства, б&льшая надежность и возможность работы как в инфракрасном, так и в радиотехническом диапазонах волн; недостатки: сложнее решаются задачи изжрения дальности и скорости, особенно многих целей и на больших расстояниях. § 61. Радиолокационные маяки и устройства опознавания целей Эти устройства играют вспомогательную роль в работе радиолокационных систем. Радиолокационные маяки и ответчики устанавливаются стационарно или на движущихся объектах для более эффективного, чем при активной радиолокации по пассивным целям, определения ме-
Передатчик Запросчик Выходное устройство Дешифратор Приемник Ответчик-маян Приемник Дешифратор Передатчик Шифратор блон управления Дополнительная информация Рис. 8.25. Функциональная схема системы запросчик т-стационарный ответчик (маяк) . стоположения целей и измерения их координат. Устройства опознавания предназначены для выявления государственной принадлежности, типа самолета, корабля и других данных о целях, на которых установлены ответчики системы опознавания. 61.1. Радиолокационные маяки. Запросчиком, взаимодействующим с радиолокационными маяками, может быть РЛС обнаружения или автономное устройство. На рис. 8.25 показана функциональная схема автономного запросчика и ответчика, играющего роль стационарного радиолокационного маяка. Импульсами синхронизатора запускается шифратор, предназначенный для формирования кода запроса. Передатчик генерирует радиоимпульсы, соответствующие этому коду и имеющие несущую частоту fi. Антенна запросчика Ад излучает, а антенна ответчика A принимает радиоимпульсы. С выхода приемника видеоимпульсы следуют в дешифратор. Если код правильный, то через блок управления запускается шифратор, который формирует ответный код. В случае передачи дополнительной информации об объекте, последняя вводится в шифратор и отражается в коде ответного сигнала. Передатчик маяка генерирует ответные радиоимпульсы с несущей частотой fz. Антенна Ао излучает, а антенна Ад принимает ответные сигналы, которые после преобразования в приемнике запросчика проверяются в дешифраторе. При правильности кода сигналы опознавания следуют в выходное устройство типа электронно-лучевого индикатора или потенциалоскопа с индикацией в виде светящихся букв и цифр. Запросные сигналы кодируются по-разйому для гражданских и военных самолетов, кораблей и других объектов. Благодаря этому ответчики м еньше нагружаются: они реагируют только на запросы, обращенные к данной группе цейей. Вместе с тем кодирование запроса уменьшает вероятность срабатывания ответчиков от помех или незапросных импульсов РЛС. Кодирование ответных сигналов дополнительно повышает помехозащищенность системы. Ответчики, особенно если это маЯки подвижных целей, отличаются от запросчиков меньшей мощностью передатчиков, меньшей чувстви- Чушая цель Своя цель 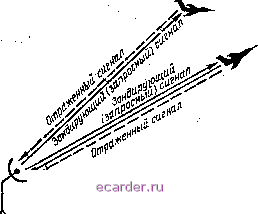 Отметнсс чужой цели \ . j/ - Основная отметка Л Ответный Л \ своей сигнал f Г Гцели V Готметка опознаваниям Рис. 8.26. Сигналы совмещенной системы опознавания (а.) и их изображение на экране индикатора (б). тельностью приемников и отсутствием направленности в горизонтальной плоскости. Понижение чувствительности приемника способствует повышению помехоустойчивости ответчика (последний не реагирует на слабые случайные сигналы), а малая мощность передатчика компенсируется повышенной дальностью активной радиолокации и повышенной чувствительностью приемника запросчика. 61.2. Системы опознавания (57, 67, 68, 33, 34, 39, 41, 44] удовлетворяют следующим требованиям. 1. Для того чтобы все наблюдаемые цели были опознаны, система должна иметь дальность действия и разрешающую способность не меньшие, чем РЛС-запросчик. 2. Необходимо исключить возможность распознавания кодов и имитацию сигналов, особенно ответных, противником во избежание тяжелых последствий, которые может повлечь за собой несовершенная работа системы (например, ведение огня по своим целям). 3. Пропускная способность системы должна удовлетворить максимально возможному количеству запросных и ответных сигналов в реальных условиях. Системы опознавания делятся на совмещенные, автономные и комбинированные. В совмещенной системе (рис. 8.26, а) РЛС совмещает основные функции с генерированием запросных сигналов, приемом и расшифровыванием ответных сигналов. Для запроса зондирующее излучение кодируется, а ответные сигналы чужих и своих целей различают тем, .что пфвые образованы только отраженным сигналом, а вторые - еще и кодированным, который на экране индикатора формирует отметку опознавания (рис. 8.26, б). Ъон8ир1/ющий uMnffPhc Отраженный сигнал Чужая цель Запросный сигнал(,) 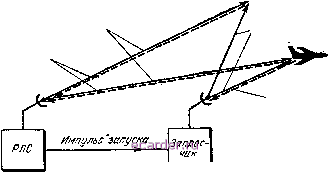 Своя цель  Отметка чужой цели Отметка опознавания своей цели Сигналы опознавания  Ответный cuinanCfi) Отметка опознаваШЯ сваей цела Индикатор РЛС Индикатор запросчакй Рис. 8.27. Сигналы автономной системы опознавания и их изображение на экранах индикаторов РЛС н запросчика. Преимущества совмещенной системы: а) в ней нет отдельного запросчика, так как функции запроса выполняет РЛС; б) благодаря острой диаграмме направленности антенны РЛС достигается высокое разрешение запроса по углам. Недостатки: а) в связи с тем, что запро-счиками являются РЛС, которые могут работать на различных волнах диапазона УКВ, приходится на каждом объекте устанавливать по несколько ответчиков, охватывающих весь диапазон радиолокации; б) так как после приема ответного сигнала излучение зондирующих импульсов не прекращается, то появл-яются ненужные ответные сигналы и облегчается обнаружение цели противником. В aemxjHQMHOu системе (рис. 8.27) функции РЛС и запросчика выполняются отдельными близко расположенными устройствами. Импульс запуска следует от РЛС к запросчику, передатчик которого работает на несущей частоте Д. Ответные сигналы опознавания излучаются на несущей частоте fz- После известных преобразований ответные сигналы индицируются на экране индикатора запросчика, а при замкнутом тумблере П и на экране индикатора РЛС. С помощью блока управления 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 [40] 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |