
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 [41] 42 43 44 45 46 47 48 49 50 51 52 53 54 55  Ответчик запрос прекращается, благодаря чему происходит разгрузка ответного канала и маскирование цели. К преимуществам автономной системы относится также возможность использования ответчиков одного типа независимо от несущих частот тех РЛС, с которыми сопряжены устройства опознавания. Недостатки автономной системы: так как ее антенны имеют меньший раскрыв и работают на более длинных волнах, чем антенны РЛС, то разрешающая способность автономной системы хуже (шире луч), чем совмещенной. В результате не всегда имеется возможность точно установить, относится ли сигнал опознавания к той цели, которая обнаружена РЛС. Комбинированная система опознавания. Здесь код запроса образуется зондирующим импульсом РЛС на частоте / , как в совмещенной системе, и импульсами запросчика на частоте /i, как в автономной системе (рис. 8.28). Синхронность генерирования кода импульсов достигается тем, что запросчик запускается от РЛС. В ответчике имеются отдельные приемные каналы на частотах /о и Д. С выхода каналов запускается шифратор и передатчик ответчика, причем ответный сигнал появляется только тогда, когда принята вся кодовая группа зондирующего и запросных импульсов. Это создает большие преимущества: разрешающая способность системы опознавания определяется острым лучом антенны РЛС, и потому она выше чем в автономной системе; ответчики реагируют только на весь код запроса, и это способствует их разгрузке от ненужных для опознавания запросов; так как запрос принимается только в ту часть времени работы запросчика, когда цель облучается остронаправленной антенной РЛС, то дополнительно повышается помехозащищенность системы. Комбинированная система несколько усложняется каналом приема зондирующих импульсов, но так как уровень этих импульсов высокий, то прием их не требует сложного устройства. В общем комбинированная система опознавания наиболее совершенная. Рис. 8.28. Упрощенная схема взаимодействия РЛС, запросчика и ответчика в комбинированной системе опознавания. Глава 9. РЛС СИСТЕМ УПРАВЛЕНИЯ § 62. Управляемые летательные аппараты и задачи управления 62.1. Основные определения. Радиоуправлением называется управление объектами с помощью радиотехнических средств. Методы и средства управления наиболее полно отражены в управлении движением летательных аппаратов (ЛА), и в частности управляе-250 мых снарядов (УС). Для этой цели используются радиотехнические и нерадиотехнические приборы, но наибольшую точность обеспечивает радиотехническое управление. Системы радиоуправления включают в себя радиолокационную, радионавигационную и радиосвязную аппаратуру. Как известно, дальнобойность реактивного снаряда очень большая и скорость воздушных целей с реактивными двигателями очень велика: в единицы - десятки раз больше скорости звука. В таких условиях необходимо точное управление летательными аппаратами, особенно реактивными снарядами. Необходимая точность была достигнута, когда стало возможным использование радиолокационных средств наблюдения за управляемыми ЛА и целями - радиолокационных визиров (координаторов). Поэтому интенсивное развитие радиоуправления связано с появлением в 40-х годах реактивной техники и радиолокации. Применяется ручное, автоматическое и универсальное управление ЛА. Ручное (неавтоматическое) управление осуществляется пилотом (оператором), но так как в настоящее время информация, необходимая для оператора, поступает из различных автоматических устройств, то такое управление иногда называют автоматизированным. В автоматическом управлении человек непосредственного участия не принимает, его функции сводятся к периодическому контролю работы системы и замене неисправной аппаратуры. Универсальное управление означает, что в контур автоматического управления может включаться оператор. Ручное управление наименее точное и наиболее инерционное. Быстродействие и точность автоматического управления высоки и повышаются по мере внедрения в системы управления ЭВМ. Вместе с тем наблюдается тенденция к использованию универсального управления даже в тех ЛА, которые ранее проектировались как беспилотные. Возможность включения оператора в контуры автоматической системы управления придает системе большую гибкость. Система управления снарядом является составной частью комплекса УС, который в общем случае содержит также стартовое устройство, пункт управления, иначе называемый командным пунктом (КП), собственно УС и др. Метод и способы управления, траектория и весь комплекс УС выбираются с учетом таких факторов, как: неподвижно или подвижно место старта; неподвижна, малоподвижна или весьма подвижна цель; возможность использования излучающих и отражающих свойств цели; дальность действия УС и др. Основные способы управления следующие: автономное, самонаведение и командное (телеуправление). Автономное управление осуществляется по программе, которая вводится перед стартом в бортовое устройство УС. Самонаведение означает, что управляющие сигналы вырабатываются на борту УС, но под воздействием сигналов, излучаемых или переизлучаемых целью. Отличительной чертой командного управления является то, что имеется КП, на котором формируются команды управления снарядом. Применяется еще комбинированное управление - это сочетание двух или более основных способов управления. 62.2. Управляемые ЛА. Одну группу управляемых ЛА составляют атмосферные аппараты: пилотируемые самолеты и вертолеты; автома-тичёски управляемые самолеты-снаряды, самолеты-мишени и самолеты-разведчики. Другую группу образуют космические аппараты: искусственные спутники Земли; или других планет и межпланетные корабли- . . >-= 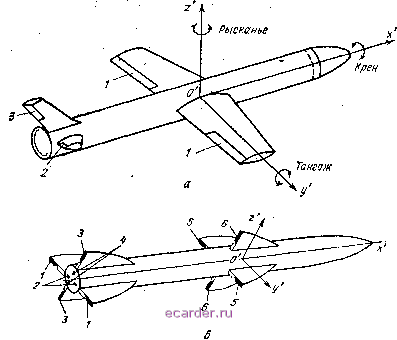 Рис. 9.1. Управляемые снаряды. Управляемые снаряды (yQ классифицируются по то1ткам нахождения старта и цели: поверхность-воздух (зенитные ракеты), воздух-поверхность , воздух-воздух (авиационные) и поверхность-поверхность (баллистические). Управление летательным аппаратом складывается из управления полетом, т. е. движением центра тяжести О аппарата, и управления ориентацией - поворотами вокруг этого центра (рис. 9.1, а). Поворот, совершаемый относительно продольной оси Ох, называется креном, вокруг поперечной оси О/ - тангажом (наклоном) и вокруг перпендикулярной к ним оси Oz - рысканием (скольжением). Система координат Охуг жестко связана с ЛА. Другая система координат Охг/г, называемая стартовой, me&i: начало в центре тяжести ракеты, находящейся на стартовой площадке; ось Ох направлена на цель, ось Огв зенит нОу- перпендикулярна первым двум осям. Координаты точки О в стартовой системе (дальность X, боковое перемещение у и высота г) позволяют судить о движений центра тяжести ЛА. При исследовании динамики движения ЛА пользуются инерци-альной системой координат, начало которой расположено в центре тяжести Земли или ЛА, а оси ориентированы относительно какой-либо звезды, которая представляется неподвижной в мировом пространстве. С некоторым приближением земную систему координат считают инер-циальной, но это применимо только к УС, движущимся в~ земной атмосфере. Для изменения положения и ориентации ЛА следует изменить его линейную и угловые скорости, а чтобы сообщить ускорение аппарату, нужно приложить к нему соответствующие силы.
Система формирования и леревачи команд fteaocHU-тельное устройстЗо УпраВйясмый Рис. 9.2. Упрощенная функциональная схема системы радиоуправления. Самолет-снаряд (рис. 9.1, а) называют иначе крылатым управляемым снарядом, так как основная подъемная сила сообщается ему крыльями. Крылатый снаряд управляется по такой же аэродинамической схеме, как самолет. Угол крена регулируется элеронами /, расположенными на крыльях: если один из элеронов поднимается, другой на равный угол опускается, и действующий на них воздушный поток создает момент вращения вокруг продольной оси ЛА. Рули тангажа (высоты) 2 одновременно поднимаются или опускаются, от чего ЛА наклоняется к оси Оу. Поворот руля курса 3 сопровождается вра1цением ЛА вокруг оси Oz, т. е. изменяет угол скольжения (рысканья) Л А. Ракета или не имеет крыльев, или они малой протяженности. Различают полярное рулевое управление ракетой, которое производится по самолетной схеме (рис. 9.1, а), и управление в прямоугольной системе координат с основными рулями: тангажа 1, 2 п курса 3, 4 (рнс. 9.1, б). Эти рули могут быть аэродинамическими (реагирующими на воздушные потоки) (/, 3) и газовыми (2, 4) (реагирующими на струи газов, выходящих из сопла двигателя). Для управления в прямоугольной системе характерно также, что элероны (5, 6) только стабилизируют крен; если же элеронов, как и крыльев, на ракете нет, то появляющийся крен компенсируется поворотом рулей (3, 4) в разные стороны от нейтрального положения. 62.3. Упрощенная функциональная схема управления летательными аппаратами. В общем случае для радиоуправления ЛА (снарядом) требуются (рнс. 9.2): система измерения пространственных координат и параметров движения цели и управляемого ЛА; система формирования и передачи командных сигналов; исполнительное устройство (рулевые машины), преобразующие командные сигналы в перемещения рулей управления, и, наконец, объект управления ЛА (УС). в состав измерительного устройства входят: радиолокационные визиры, различные радиотехнические и нерадиотехнические датчики (чувствительные элементы) и др. Система формирования команд и исполнительное устройство образуют автопилот, в котором имеются каналы управления таигажом, курсом и креном. Устройства управления в целом образуют сложную замкнутую (реже разомкнутую) систему автоматического регулирования с внешними и внутренними контурами. 5иешине ;ои/пг/рбг соответствуют управлению движением центра масс ла, а внутренние - управлению ориентацией ла. Основные режимы работы этой системы следующие: режим стабилизации, направленный на поддержание постоянного углового положения (ориентации) ла, которое может быть нарушено внешними возмущениями (порывом ветра, отделением ступеней ракеты и др.); режим слежения, при котором полет управляемого ла следует за движением цели или профилем местности, над которой пролетает ла; режим программного регулирования, обеспечивающий движение ла по заданной программе. § 63. Траектории ЛА и основные способы управления 63.1. Траектории ЛА. Полет ла совершается по фиксированной или нефиксированной траектории с активными и пассивными участками. Фиксированная траектория используется при заранее извест- Баплистическая нривая   а <Г Рис. 9.3. Траектория полета самолета-снаряда (а) и баллистической ракеты (б). ных координатах старта и цели. Это позволяет еще до вылета ла рассчитать траекторию аппарата и составить программу управления. Самолет-снаряд класса поверхность-поверхность описывает следующую фиксированную траекторию (рис. 9.3, а): старт с наклонного лафета, ускоренный набор высоты (от КП до А), полет на заданной высоте (от Л до С) и пикирование на цель. Траектория баллистической ракеты (БР) тоже фиксированная (рис. 9.3, б): БР стартует вертикально вверх от КП до точки А, летит по программированной кривой АВ; в точке В ракетный двигатель выключается и активная часть траектории кончается; БР описывает в разреженной атмосфере баллистическую кривую ВС и через плотные слои атмосферы пролетает к цели. Основное различие между управле- нием движения БР и самолета-снаряда в том, что во время полета в безвоздушном пространстве БР не испытывает воздействия окружающей среды и летит по инерции, тогда как самолет-снаряд на всем протяжении полета находится под таким воздействием и нуждается в управлении; только непродолжительный этап пикирования можно сделать пассивным. 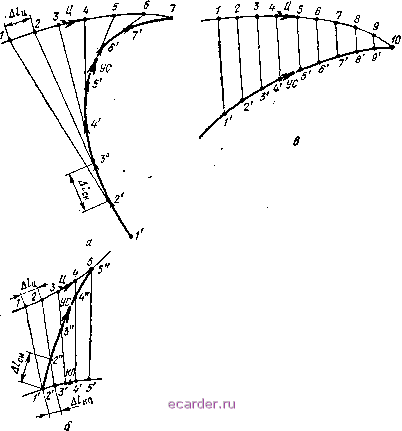 Рнс. 9.4. Траектории полета ЛА при различных методах наведения. Нефиксированные траектории реализуются двухточечными или трехточечными методами. Двухточечный метод означает, что траектория определяется взаимным расположением ла и цели, а трехточечный - ла, цели н КП. Нефиксированная траектория зависит еще от метода наведения: по кривой погони, параллельного сближения, накрытия и т. д. Если наведение производится по кривой погони, то в любой момент времени вектор скорости управляемого снаряда (УС) направлен на цель. Кривая погони при двухточечном наведении такова (рис. 9<4, а): в каждой точке этой траектории 1, 2, 3, ... УС легит по направлению к цели Ц из занимаемого им в данный момент времени положения. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 [41] 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |