
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 [42] 43 44 45 46 47 48 49 50 51 52 53 54 55 При равной длине Al элементарных участков l-2i 2-3.....пролетаемых целью, лрстоянных скоростях цели Уц и снаряда v последний пролетает соответствующие участки Д/ся своей траектории Г-2, 2-3, ... за равное время; Д/= А/ц/Уц = А/сн/осн, (9.1) откуда А4н = VcMJv (9.2) Зная, что вектор скорости УС должен быть направлен на цель, и определяя по формуле (9.2) длину каждого элементарного участка А/сн. можно построить кривую погони за целью, движущейся по известной траектории. По кривой погони наводятся зенитные и авиационные ракеты, а также истребители. При этом используется, в частности, бортовой радиолокатор управляемого ЛА для визирования цели относительно продольной оси ЛА. Недостаток наведения по кривой погони - значительное уменьшение радиуса кривизны траектории с приближением к цели, что может вызвать чрезмерную поперечную перегрузку УС и пролет его мимо быстро движущейся цели (y > 30 м/с). Этот недостаток слабее выражен в методе накрытия цели, который, однако, может быть использован только при трехточечном наведении. Отличительная черта этого метода состоит в том, что в любой момент времени цель Ц, внешний КП и УС, наводимый с этого КП на цель, должны находиться на одной прямой (рис. 9.4, б). При определении траектории снаряда Г, 2 , 3 , ... учитывается также, что отрезки пути Д/ц, А/сн, Дкп. пройденные за один и тот же промежуток времени At целью, УС и КП, пропорциональны их скоростям Сц, Усв. Ун (командный пункт может быть подвижным, примером подвижного КП является самолет-ракетоносец). КП снабжается двумя РЛС, из которых одна служцт радиовизиром цели, а другая - радиовизиром снаряда, и по выходным данным радиолокаторов вырабатывается команда управления на УС. Согласно командам угол рассогласования между направлениями КП - цель и КП - УС сводится к минимуму. Когда скорость цели настолько велика, что близка к скорости снаряда, выбирают траекторию с упреждением. Этим избегают чрезмерного уменьшения радиуса кривизны с приближением УС к цели. Именно таким свойством обладает метод параллельного сближения. В двухточечном варианте этого метода (рис. 9.4, в) линия визирования цели УС-Ц не изменяет своего наклона, благодаря чему встреча УС с целью происходит в упревденной точке 10. § 64. Автономное управление летательными аппаратами 64.1. Принцип действия. Автономным управлением Л А называется такой способ управления, при котором вся информация, необходимая для получения управляющих сигналов, и сами сигналы получаются с помощью бортовой аппаратуры; более того, никаких других приборов, кроме имеющихся на борту ЛА, для управления не требуется. 256 Система автономного радиоуправления (рис. 9.5) состоит из программно-временного и радиоизмерительного устройств, автопилота и объекта управления - летательного аппарата. Это система автоматического регулирования, внешний контур которой замыкается через радиоизмерительное устройство, определяющее текущие параметры движения центра масс ЛА. Внутренние контуры системы замыкаются через нерадиотехнические датчики ориентации ЛА и рулевого тракта. Траектория полета и изменения во времени параметров движения ЛА, т. е. его скорости,-высоты, углов тангажа, крена, курса и др., рассчитываются до вылета. Эти данные вводятся в бортовое програм- ЗаЗанная траектория. Автопилот
Вычислительное и усилительно-npeoвpaзoвa- тельное устройство Команды управления Рулевые машины Рули Датчики рулевого тракта Корпис Л А Датчики ориенпуаиии Движение ЛА вокруг иентра масс Движение иентра масс ЛА Рис. 9.5. Функциональная схема автономного управления ЛА. мно-временное устройство. Автопилот начинается с вычислительного устройства, в которое вводятся программа полета и выходные данные радиоизмерительного устройства внешнего контура автоматического регулирования. Это позволяет рассчитать текущие координаты ЛА и сопоставить их с запрограммированными для данного момента полета. В результате вычислений выявляется сигнал рассогласования, который должен быть усилен, сформирован в команды управления (управляющие сигналы) и в таком виде подан на исполнительное устройство (рулевые машины). Усилители управляющих сигналов используются одновременно для таких вычислительных операций, как, например, суммирование. Так как усиливать предпочтительнее сигналы переменного тока (нет дрейфа нуля), то напряжения постоянного тока, снимаемые с датчиков, преобразуются в напряжения переменного тока, усиливаются и затем снова преобразуются в постоянные напряжения. Прямое преобразование производится в модуляторе, а обратное - в демодуляторе. Рулевые машины, реагируя на управляющие команды, перемещают рули управления таким образом, чтобы сигнал рассогласования был сведен к нулю. Этому способствует уточнение управляющих сигналов ПО данным, которые поступают в вычислительно преобразовательное устройство с датчиков положения рулевых органов, углового положения ЛА и др. Таким образом, одновременно производится автоматическое управление как полетом (по внешнему контуру регулирования), так и ориентацией и стабилизацией ЛА (по внутреннему контуру регулирования). Программно-временное устройство выдает жесткую или гибкую программу. В первом случае программа полностью соответствует расчетам, произведенным до старта ЛА, а во втором предусматривается обратная связь от измерителей и датчиков к программно-временному устройству, что позволяет автоматически корректировать программу согласно реальным условиям полета ЛА.
Рис. 9.6. Функциональная схема автономного радиоуправления высотой полета ЛА, 64.2, Радиотехнические измерительные устройства. В данную группу радиоустройств входят: допплеровские измерители скорости, радиовысотомеры, радиоастроориентаторы, радиовертиканты, измерители типа панорамной РЛС и радйоизмёрители полуавтономных систем управления. Радиовысотомер, измеряющий высоту Н полета Л А. В вычислителе (рис. 9.6) результат измерения высоты Я сравнивается со значением высоты Язд, вводимой из запоминающего устройства. Вычисленное рас- согласование АЯ = Я - Яд преобразуется в команду н т, по которой канал автопилота, предназначенный для управления по тангажу, устраняет рассогласование. Допплеровский измеритель скорости в совокупности с радиовысотомером, программным и вычислительным устройствами образует систему автономного радиоуправления. По измеренным значениям скорости и высоты полета вычисляются текущие координаты ЛА, которые сравниваются с запрограммированными координатами; в результате выявляется сигнал ошибки и формируется команда управления исполнительному устройству. Высокую точность управления обеспечивает авпюномная навигационная система счисления пути, составленная из допплеровского измерителя путевой скорости и угла сноса, датчика курса, навигационного вычислителя и автопилота (рис. 9.7). К вычислителю текущих координат поступает информация о путевой скорости w и угле сноса а - от ДИСС, о курсовом угле (КУ) - от датчика курса и о координатах начального пункта - из запоминающего устройства. По этим данным вычислитель выполняет следующие операции: определяет северную и восточную составляющие скорости ЛА: интегрирует их во времени и этим определяет соответствующие приращения пути; прибавляет ко- ординаты старта и выдает северную и восточную составляющие текущих координат ЛА. Следующий вычислитель сопоставляет текущие координаты с координатами цели, вводимыми из запоминающего устройства. В итоге получается сигнал-курса на цель, из которого формируются команды управления для автопилота. Кроме того, вычисляется расстояние до цели. В пилотируемых ЛА предусматривается указатель, на котором индицируются текущие координаты, требуемый курс и расстояние до цели. Радиоастроориентатор - прибор, предназначенный для определения местонахождения ЛА по результатам пеленгации радиоизлучения небесных тел. Координаты начального пункта Координать/ конечного пункта
Рис. 9.7. Функциональная схема автономной иавигациоиной системы, х Положение точки на земной поверхности задается ее географическими координатами - широтой ф и долготой Я. (рис. 9.8, а). Широтой точки М. называется угол между плоскостью экватора и радиусом Земли ОМ, проходящим через параллель этой точки. Широта ф принимает значения от О до ± Ш, а долгота - от О до ± 180°. Положительным значениям ф соответствуют северные широты флг, отрицательным - южные ф5. Долготой точки М называется двугранный угол X между плоскостями двух меридианов, из которых один NMMS пересекает данную точку М, а другой NQS является нулевым меридианом, пересекающим место расположения Гринвичской обсерватории. Положительные величины к означают восточную долготу, а отрицательные - западную. Принцип вычисления географических координат ЛА с помощью астронавигационного ориентаюра заключается в следующем. Если мысленно соединить прямой линией центр Земли О с небесным телом Z (рис. 9.8, б),*то точка пересечения этой линии с земной поверхностью называется геометрическим местом светила (ГМС). В произвольной точке Земли М луч, исходящий из светила Z, образует с горизонтальной площадкой АВ угол h, который называется высотой светила. В ГМС светило находится в зените и поэтому высота его максимальная ih = 90°). Можно провести круги равных высот с центром в ГМС (рис. 9.8, в). Радиусы кругов тем больше, чем меньшим высотам h данного светила 9* 259 йулеВоа меридиан точна /f 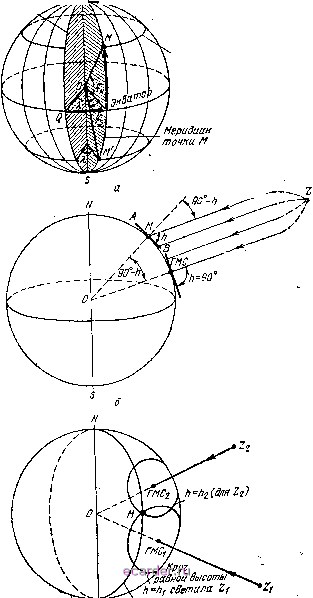 S Меридиан точна М Рис. 9.8. Географические координаты точки земной поверхности (а) и принцип вычисления этих кординат посредством астронавигационных ориентаторов \р,в\. Z он-и соответствуют. Искомая точка М находится на пересечении двух кругов, из которых один соответствует высоте-/г1 светила Zi, а другой - высоте кг светила Zj. Данные углы измеряются раздельно с помощью двух радиосекстантов, автоматически сопровождающих эти светила по направлению. Результаты пеленгации вводятся в счетно-решающее устройство для автоматического определения места ЛА. Антенны радиосекстантов смонтированы на общей горизонтально стабилизированной платформе. Луч каждбй антенны совершает коническое сканирование. Это необходимо не только для АСН светила, но и потому, что амплитудная модуляция флуктуационного радиоизлучения светила позволяет отличить его от внутренних шумов радиосекстантов. Оптимальными значениями длины волны \ для радиосекстантов считают X. ~ 2 см и Я = 8,7 мм. При длинах волн, меньших 8,7 мм, сильно сказывается поглощение в атмосфере, а при больших 2 см требуются более громоздкие антенны. По мнению зарубежных специалистов, более перспективны радиосекстанты ЛА с рабочей длиной волны 8,7 мм, так как они могут работать в любую погоду и вместе с тем дают большую точность сопровождения, чем при Я ~ 2 см [7]. Радиовертиканты. Эти приборы предназначены для определения вертикали к поверхности, над которой находится ЛА. Применяются однолучевые и многолучевые радиовертиканты. В однолучевых используются АСН по методу конического сканирования. Когда ось сканирования перпендикулярна облучаемой поверхности, амплитуда отраженных сигналов не меняется, а когда наклонена к местной вертикали, происходит амплитудная пеленгация сигналов. По огибающей этих радиосигналов вырабатывается сигнал ошибки и устраняется рассогласование оси сканирования с вертикалью. В четырехлучевомрадиовертиканте лучи антенной системы располагаются как в ДИСС, а угол отклонения от вертикали определяется по сумме и разности сигналов, принятых по двум парам лучей. Таким образом, радиовертикант может непрерывно измерять угловые отклонения ЛА относительно местной вертикали, а это позволяет с помощью вычислителя и остальных устройств следящей системы обеспечить стабилизацию ЛА по углам. Радиоизмеритель типа бортовой панорамной РЛС. Радиолокационное изображение, снимаемое этой РЛС, сопоставляется с образцом радиолокационной карты местности, над которой должен находиться ЛА по заданной программе. Данные о смещении изображения вводятся в навигационный вычислитель, рассчитывается сигнал ошибки и по нему корректируется траектория ЛА. Радиоизмерители полуавтономной системы управления Л А. В дан-пом случае управляющие сигналы полностью формируются на борту, но для работы системы требуются искусственные радиоориентиры, находящиеся вне ЛА. Такими ориентирами могут служить, например, радиомаяки или ответчики, расположенные в известных опорных пунктах. Тогда местоположение ЛА определяется по одному из известных методов радионавигации, например по разностно-дальномер-ному. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 [42] 43 44 45 46 47 48 49 50 51 52 53 54 55 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||