
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 [43] 44 45 46 47 48 49 50 51 52 53 54 55 64.3. Нерадиотехнические датчики автономной системы управления. Из этой группы датчиков рассмотрим гироскопические, инер-циальные и астронавигационные. Гироскопические датчики предназначены для угловой ориентации ЛА. Ротору гироскопа сообщают очень быстрое вращение, и за счет весьма значительного кинетического момента ротора направление его оси сохраняется неизменным в пространстве. На этом явлении основывается действие гироскопических датчиков, из которых наибольшее применение получили свободные (трехстепенные) и скоростные (двухстепенные) гироскопы. В свободном гироскопе (рнс. 9.9) массивный ротор / вращается на подшипниках вокруг своей оси 2, называемой главной осью гироскопа. Скорость вращения достигает 36 тыс. оборотов в минуту. Вал ротора 2 охватывается внутренней рамкой 3 кардано-вого подвеса, которая, в свою очередь, помещается на опорах в наружной рамке 4 и может вращаться вместе с ротором вокруг оси у. Третья степень свободы выражается в том, что наружная рамка вместе с внутренней и ротором может вращаться относительно корпуса 5 вокруг оси X. При произвольном изменении ориентации ЛА главная ось гироскопа сохраняет свое на- 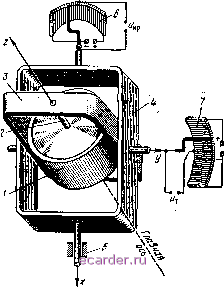 Рис. 9.9. Трехстепенный гироскоп. правление в пространстве, но положение рамок относительно корпуса изменяется. Если с осями рамок гироскопа жестко связаны движки потенциометров, а обмотки этих потенциометров жестко связаны с корпусом ЛА, то напряжения, снимаемые с потенциометров, пропорциональны углам ориентации ЛА. Пусть, например, ось ротора г направлена вертикально. Тогда отклонение внутренней рамки и напряжение Ыт потенциометра 7 пропорциональны углу тангажа, а отклонение наружной рамки и напряжение и р потенциометра 6 пропорциональны углу крена. Эти напряжения можно использовать для стабилизации ЛА по тангажу и крену. В гировертиканте ось ротора гироскопа совпадает с горизонтально-поперечной осью ЛА, находящегося в горизонтальном полете.. При таком расположении главной оси гироскопа последний не реагирует на угол тангажа и позволяет стабилизировать Л А по углам курса и крена. Таким образом, с помощью двух свободных гироскопов можно измерить все три угла ориентации ЛА. На основе свободных гироскопов можно создать платформу, стабилизированную в инерциальном пространстве. £62 В двухстепенном гироскопе внешняя рамка зажата в корпусе, а ось внутренней рамки связана с кожухом гироскопа пружиной. В таких условиях угол поворота рамки пропорционален угловой скорости вращения ЛА относительно оси, перпендикулярной плоскости рамки. Следовательно, для измерения угловых скоростей по тангажу, курсу и крену требуются три скоростных гироскопа. Такие гироскопы используют, например, в качестве датчиков угловых скоростей в цепях обратной связи автоматов стабилизации, так как введение в контур регулирования производной от угла способствует устойчивости системы стабилизации ЛА по этому углу. 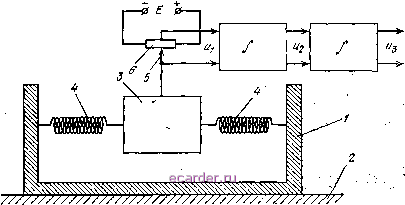 Рис. 9.10. Функциональная схема инерциального координатора. Инерциальные датчики предназначены для получения данных о движении ЛА путем интегрирования ускорений, измеряемых акселерометрами. На площадке, стабилизированной в плоскости горизонта с помощью гироскопов, размещены три акселерометра с взаимно перпендикулярными измерительными осями. Функциональная схема одного акселерометра показана на рис. 9.10. Корпус прибора / прикреплен к стабилизированной с помощью свободных гироскопов платформе 2. Массивное тело 3 оттягивается пружинами 4 и, подчиняясь закону инерции, реагирует на ускорение ЛА в направлении измерительной оси акселерометра. Это приводит к тому, что движок 5 смещается относительно обмотки потенциометра 6 пропорционально данному ускорению. По такому же закону изменяется напряжение Uf, снимаемое с потенциометра. После первого интегрирования Ui во времени получается напряжение Uz, пропорциональное скорости, а после второго - из, пропорциональное пройденному пути. Благодаря применению гиростабилизированной платформы выходные данные интеграторов соответствуют неподвижной, т. е. инерци-альной, системе координат. Вычислительное устройство пересчитьгеает эти координаты в стартовую систему, т. е. относительно Земли. В вычислительное устройство вводят также координаты старта и таким образом получается инерциальная система счисления пути, которая используется для управления дальностью полета ракеты. Инерциальиое измерение ускорений не требует никаких внешних ориентиров и приборов. Следовательно, инерциальная система управления автономная в полном смысле этого слова. Существенный недостаток системы-непрерывное накапливание ошибок измерений. Астронавигационные датчики (секстанты) имеют такое же назначение, как и радиосекстанты, только они измеряют высоты светил по их световому излучению, а не по радиоизлучению. Это имеет свои пре имущества и недостатки. В то время как радиоастроориентаторы работают в любое время суток и в любую погоду, астроориентаторы работают только при оптической видимости небесных светил. С другой стороны, астроориентаторы- более точные навигационные приборы, jCM радиоастроориентаторы. 64.4. Комбинированные системы автономного управления. Автономные системы управления с применением любого из рассмотренных измерителей имеют свои ограничения и недостатки. Например, гироскопические приборы не реагируют на боковые сносы ЛА, так как это не сопровождается поворотами корпуса аппарата, а при инерциальных датчиках ошибки измерений накапливаются с течением времени. Астронавигационная система, хотя и свободна от этого недостатка, но требует очень большой точности изготовления и тщательной предполетной подготовки. В связи с этим находят применение комбинированные системы автономного управления. Примером может служить использование гиро-стабилизированной платформы для размещения акселерометров или антенн допплеровского измерителя скорости и угла сноса. Тем самы.! стали возможными измерения на ЛА в инерциальной (гироскопической) системе координат. Сочетание инерциальной системы управления с гироскопической позволяет избежать ошибок от бокового сноса ЛА, Применяются и такие комбинированные системы, как астроинср-циальная, инерциально-допплеровская и др. Астроинерциальная система свободна от накопления ошибок, так как данные инерциальных измерителей корректируются астронавигационными измерениями, В инерциально-допплеровской системе ошибки инерциальной части корректируются допплеровским измерителем; возможна также обратная коррекция. В заключение отметим достоинства и недостатки автономных систем управления. Достоинства: а) в системе нет такого канала, по которому противник мог бы создавать помехи управлению; б) высокая точность и практически неограниченная дальность действия. Недостатки; еще до пуска УС требуются точные данные о месте старта, координатах и параметрах движения цели; бортовая аппаратура сложнее, чем в других системах управления. Автономное управление применяется преимущественно для наведения ракет класса поверхность-поверхность . § 65. Самонаведение летательных аппаратов [12, 20, 29, 31, 35] 65.1. Типы систем самонаведения. Самонаведение может быть пассивным, полуактивным и активным. Пассивное самонаведение производится по собственному излучению цели, полуактивноещп подсвете цели с Места пуска УС и активное - при облучении цели бортовой антенной системы самонаведения. Пассивная система в наибольшей мере защищена от умышленных помех противника благодаря полной скрытности своей работы, но дальность действия ее обычно невелика и в большой степени зависит от интенсивности и направленности излучения цели. В активных системах вся необходимая д}я самонаведения аппаратура находится на борту УС. Поэтому самолет или корабль, с которого запущен УС, может совершать любой маневр, какого потребует обстановка. Кроме того, ид1тенсивность собственного излучения целине играет никакой роли при активном самонаведении. Недостатки этой системы: наличие передатчика существенно увеличивает вес и габариты бортовой аппаратуры и лишает РЛС скрытности. Полуактивная система отличается наибольшей дальностью действия, поскольку станция подсвета наземная и мощность ее передатчика, а также усиление ее антенны можно сделать намного большими, чем в бортовом радиопередающем устройстве. Кроме того, отсутствие передатчика способствует снижению веса и габаритов бортовой аппаратуры. Не все волны (звуковые, световые, инфракрасные, радиотехнического диапазона) в равной мере отвечают требованиям самонаведения. Самонаведение УС на источник звуковых волн крайне затрудняется акустическими шумами ЛА и малой скоростью распространения звука. Самонаведение по видимым лучам {X = 0,76- 0,4 мкм) ограничивается тем, что цели при солнечном и лунном свете, дожде, снеге и тумане теряют оптическую контрастность. Инфракрасные, т. е. тепловые, волны (Х = 420 - 0,76 мкм) меньше оптических подвержены затуханию в гидрометеорах атмосферы, и все же действие инфракрасных систем сильно зависит от метеорологических условий. Радиотехнические системы самонаведения отличаются наибольшей стабильностью действия благодаря наименьшим потерям энергии радиоволн в атмосфере. Однако собственное радиоизлучение большинства радиолока-ционнбгх целей недостаточно для эффективного самонаведения, если только на цели нет работающего радиопередатчика. В литературе [12] преимущественно освещены инфракрасные системы для пассивного самонаведения и радиотехнические-для полуактивного и активного. Старту УС предшествует поиск цели, обнаружение и опознавание, а при наличии нескольких целей - и выбор одной из них для поражения снарядом. Затем должно быть определено наиболее выгодное направление пуска, произведен пуск и обеспечен переход УС в режим самонаведения. Это облегчает захват цели бортовой РЛС снаряда. В месте пуска УС (на земле или самолете-носителе) размещается РЛС обнаружения целей. В случае полу активного самонаведения здесь же размещается РЛС подсвета цели. Можно применить общую РЛО, но тогда во время наведения УС на одну цель наблюдение за другими целями будет невозможно. 65.2. Головки самонаведения. Визир (координатор) цели и устройство вычисления и формирования управляющего сигнала самонаведения размещаются в носовой части УС. Вся эта аппаратура называется голов кой самонаведения {ГС). Основная задача визира ГС - автопеленгация цели. Визир головки самонаведения воспринимает первичное или вторичное излучение цели, по которому измеряется угол рассогласования. Эти данные являются исходными для расчета и формирования команд управления с учетом /{анаа аЗтоселеппора /г Система АСЛ Poui Приетим канала син-хронизвиии SMHUH пеленгационного комола Детектор сигнала ouiSKU Усилитель. : сигнала OUtUHU Ревуктор Генератор опорных напряжений
. Двигатель сканирования Канал АСН Рис. 9,11. Функциональная схема головки самонаведения [13, 84, 85]. принятого кинематического метода наведения (без упреждения, с упреждением, по кривой погони, параллельного сближения и т. д.)! Исполнительное устройство перемещает рули управления и сводит угол рассогласования к минимуму. АСН производится по методу конического сконирования или моноимпульсному методу с использованием неследящей или следящей антенны. В визире с неследящей антенной последняя закрепляется на УС неподвижно. В таких условиях равносигнальное направление (РСН) совпадает с продольной осью снаряда, вследствие чего самонаведение на быстролетящие цели сопровождается очень резкими разворотами снаряда. При визирах со следящей антенной такого рода перегрузки значительно меньше, поскольку не УС, а гиростабилизированная платформа, на которой смонтирована антенна, вращается с изменением угла визирования цели. В такой системе имеются два контура автоматического регулирования: один для перемещения равносигнальной оси антенны, а другой - для изменения траектории УС согласно управляющим сигналам ГС. Рисунок 9.11 относится к визиру полуактивной радиотехнической системы самонаведения с пеленгацией целей по методу АСН с коническим сканированием (см. § 47). Так 1ак размеры антенны А1 этого канала ограничены условиями размещения аппаратуры на УС, то разрешающая способность пелен- 266 гатора недостаточна, чтобы исключить возможность облучения антенной нескольких целей. Здесь на помощь приходит канал автоселекцин по дальности, а в случае непрерывного излучения - автоселекции по скорости. Память по дальности и скорости, которой обладает АСД и АСС, дает возможность при случайном пропадании сигнала или отклонении от УС луча подсвета сохранить на некоторое время управлениэ снарядом. Рассматриваемый канал автоселекции по дальности отличается от описанной в § 44 системы АСД и автопоиска цели только тем, что опорные импульсы, необходимые для запуска генератора следящих импульсов, поступают извне, от РЛС подсвета цели. Антенна А2, расположенная в хвостовой части УС, улавливает зондирующие радиоимпульсы этой РЛС. В приемнике канала синхронизации радиоимпуль- сы усиливаются и преобразуются в видеоимпульсы. Ими запускается в системе АСД каскад временной задержки, который управляет задержкой следящих импульсов. Строб ыр. отпирающий приемник пеленгационного канала, несколько шире и задерживается несколько меньше, чем следящие импульсы. Видеоимпульсы цели Ыц совпадают со стробом стр- это время происходит АСД, а следовательно, и се-лектирование данной цели по дальности. Поиск и захват цели осуществляются, как известно, с помощью пилообразного напряжения генератора поиска. Приемник пеленгационного канала должен быть рассчитан на очень широкий динамический диапазон (80-100 дБ) и большую быстроту изменения сипгалов. Это связано с тем, что УС приближается к цели на наименьшее расстояние по сравнению с любым другим ЛА. В таких условиях целесообразно применение смешанной АРУ: с механической регулировкой-для получения широкого динамическбго диапазона и электронной-для обеспечения необходимого быстродействия [12]. В радиовизирах с непрерывным излучением используется допплеровский эффект для визирования и АСС для селекции целей по скорости. В данном случае особенно существенны преимущества непрерывного излучения, состоящие в меньших ограничениях минимальной дальности действия и в простоте осуществления селекции целей, и только при активном самонаведении большие затруднения вызывает развязка передающего и приемного каналов. В некоторых ракетах система самонаведения монтируется на носовом конусе, например в ракете Посейдон (США) [69}. Самонаведение применяется при повышенных требованиях, к точности наведения УС (допустимый промах порядка единиц-десятков метров) [29, 35] и при дальности действия до нескольких десятков-сотен километров [29, 70]. § 66. Системы командного радиоуправления и радиотеленаведения Так называются системы, в которых наведение на цель производится с пункта управления (КП), расположенного вне управляемого ЛА. Если команды управления полностью формируются на КП и на объект управления (например, УС) передаются по отдельному каналу, 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 [43] 44 45 46 47 48 49 50 51 52 53 54 55 |