
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 [44] 45 46 47 48 49 50 51 52 53 54 55 то это ст-кма командного радиоуправления, иначе называемого радио-телеуправлением (ТУ). Применяегся телеуправление первого и второго вида (ТУ-1 и ТУ-2). При ТУ-1 аппаратура для измерения параметров движения цели и УС полностью сосредоточена на КП, а при ТУ-2 -. преимущественно на борту УС. Радиотеленаведение, называемое иначе наведением по радиолучу, можно рассматривать как частный случай ТУ, при котором канал передачи команд заменен управляющей радиозоной (радиолучом). Управляемый е аря9 (УС) Отв, Срмс, Цель Команвныи пунлт
Рис. 9.12. Функциональная схема системы командного радиоуправления ТУ-1. Рассмотрим ТУ4 и радиотеленаведение как наиболее часто применяемые для управления снарядами типа воздух-воздух , поверх-.ность-воздух и непилотируемыми самолетами. 66.1. Система командного радиоуправления ТУ-1. Эта система (рис. 9.12) состоит из трех каналов: а) радиовизирования цели; б) радиовизирования снаряда и в) радиолинии передачи команд с КП на УС. Обнаружение цели производится станцией PJIQ по сигналам, отраженным от цели. Выходные сигналы этого радиолокатора с помощью устройства съема данных (УСД) воздействуют на силовой привод (СП) таким образом, что на ту же цель наводится антенна станции автосопровождения РЛС. Текущие координаты и параметры движения цели, выявленные РЛСц, вводятся в счетно-решающее устройство (СРУ), которое, в частности, производит все расчеты, необходимые для запуска УС со стартового устройства (СУ). Как только снаряд пролетит неуправляемый участок, в действие вступит локатор для автоматического сопровождения снаряда РЛС с. В данном случае используется воз-268 можность повысить эффективность радиовизирования снаряда применением активного ответа, для чего на УС устанавливается ответчик (Отв уо)- В счетно-решающем устройстве (СРУ) сопоставляются выходные данные РЛСц и РЛСко.ДЛя выявления параметров рассогласования снаряда и цели и расчета управляющих сигналов, которые должны соответствовать выбранному кинематическому методу наведения. По этим сигналам датчик команд (ДК) формирует команды, передаваемые по радиолинии на УС. В состав радиолинии входят передающее устройство (РПки). у€тановленное на КП, и бортовое приемное устройство снаряда (ПрМон)- Передающая анте1на командной радиолинии всегда ориентирована на УС благодаря электромеханической связи антенн станций РЛС о и РП д. На УС принятые и преобразованные командные сигналы выполняются автопилотом (АП) и рулями управления . (РУ). Если РЛС командного пункта разнесены на большое расстояние, то счетно-решающее устройство вносит поправки на параллакс. Можно объединить станции обнаружения и автосопровождения цели РЛСц и РЛСц в одну, но это будет очень громоздкий радиолокатор, так как от него потребуется большая дальность обнаружения пассивных целей при точном автосопровождении их. Иногда одновременно используют общие устройства (передатчик, приемник, антенна) для автосопровождения УС и передачи на него команд, это уменьшает размеры й вес системы. 66.2. Системы управления по радиолучу. Это такие системы, в которых для наведения УС на цель требуется один радиолокационный канал, ,причем команды управления формируются на борту снаряда. Облучение цели производится со стороны РЛС наведения, которая расположена на КП и производит АСН цели по методу конического сканирования (рис. 9.13). Стартовая площадка размещается вблизи РЛС наведения с расчетом на то, что снаряд с неуправляемого участка полета должен безотказно войти в равносигнальную зону. Тогда вступает в действие бортовая аппаратура УС: приемное устройство, которое измеряет отклонение снаряда от РСН, формирователь команд управления (ФКУ) и автопилот, устраняющий отклонение УС от РСН, направляя тем самым УС на цель. Отсутствие генератора опорного напряжения (ГОН) на борту требует передачи на УС опорного сигнала с РЛС наведения. Рассмотрим один из возможных вариантов решения задачи. В РЛС наведения (рис. 9.14) привод конического сканирования (ПС) связан с ГОН, напряжение которого и подается на триггер и систему автоматического сопровождения радиовизира цели (АСЦ). Когда опорное напряжение и проходит нулевое значение, триггер . опрокидывается и его перепадами напряжения .р запускается шифратор, который формирует определенные кодовые группы импульсов щф-На рис. 9.14, б каждая группа состоит из трех импульсов с интервалами т Т2 при возрастании и обратными интервалами (т2, Tj) при понижении опорного напряжения. Импульсы синхронизатора сн периодом следования Тс суммируются с кодовыми импульсами Ыщф и совместно модулируют генератор радиочастоты (ГРЧ). Радиоимпульсы передатчика через антенный переключатель следуют в антенну с конически сканируемой диаграммой направленности. Отраженные от цели радиосигналы принимаются той же антенной, усиливаются и преобразуются приемником (Прм), а затем системой АСЦ таким образом, что отклонение РСН от 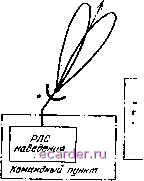 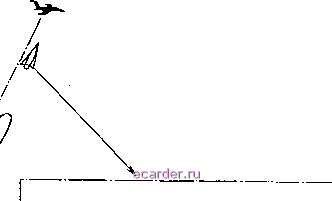 Упра9угяемь/й снаряд
Рис. 9.13. Упрощенная функциональная схема системы управления по радиолучу. цели устраняется поворотом антенны с помощью силового привода (СПА). Одновременно с АСН в системе АСЦ происходит АСД, а иногда и АОЗ цели. Принятые на борту УС радиосигналы имеют огибающую, форма и начальная фаза которой зависят от положения УС относительно РСН. В приемнике (Прм) (рис. 9.15). эти сигналы усиливаются и детектируются. Полученные видеоимпульсы в поступают в детектор сигнала ошибки (ДСО) с фильтром огибающей (ФСО) и в блок опорного сигнала. Последний состоит из дешифраторов, реагирующих на код нуля возрастающего (ДШф 1) и падающего (ДШф 2) опорного напряжений, и триггера. Выходные импульсы дешифраторов Идшь Ндш2 поочередно опрокидывают схему триггера. Вместе с тем сигнал ошибки расщепляется на управляющие сигналы тангажа Ыу., и курса Иу . Это происходит в фазовых детекторах коммутаторного типа ФДт и ФДк, на которые кроме сигнала ошибки гсо подаются со сдвигом л/2, т. е. на четверть периода сканирования луча Ток/4, опорные импульсы ир и тр. По управляющим сигналам ут и Ыук автопилот устраняет отклонение УС от РСН. Управленце по углу крена сводится к стабилизации снаряда по данному углу, которая осуществляется автономным способом. Это, кстати, имеет место и при командном радиоуправлении. Триггер Синхронизатор l/CH ,Прм
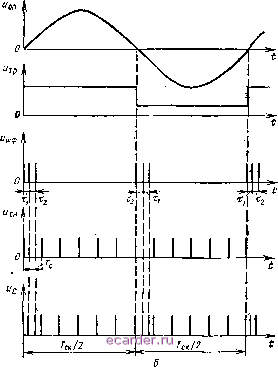 Рис. 9.14. Функциональная схема РЛС наведения по радиолучу (а) и временные диаграммы напряжений в РЛС (5)-. Как видно, наведение УС на цель происходит без упреждения, по методу накрытия цели. Для наведения с упреждением, которое желательно при быстро движущихся целях, метод сближения УС и цели должен быть трехточечным. В данном случае это означает, что радио- дшфг
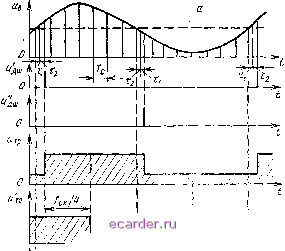 / ацтг. Uij /1 : Рис. 9.15. Функциональная схема приемного тракта бортовой аппаратуры системы наведения УС по радиолучу (а) и временные диаграммы напряжений в этом тракте(б). визирование цели и наведение УС производятся разными РЛС, каждая из которых формирует соответствующее равносигнальное направление (РСН). Заметим, что в первом варианте радиотеленаведения тоже целесообразно формирование двух лучей: широкого (20-50°) для ввода УС на управляемую траекторию и узкого (около 3°) для точного наведения на цель. Так как оба луча имеют одинаковое РСН, то схема сохраняет название однолучевой. § 67. Сравнение неавтономных/летодов радиоуправления Самонаведение имеет преимущество перед автономным управлением в том, что оно может быть использовано при отсутствии предваритель* ной (до вылета ЛА) информации о цели. С другой стороны, активное и полуактивное самонаведение, в отличие от автономного управления, подвержено влиянию помех, создаваемых противником. Пассивное радиотехническое самонаведение свободно от этого недостатка, но, как уже упоминалось, требует интенсивного излучения радиоволн целью, что не всегда имеет место. Этим объясняется, почему пассивное самонаведение используется преимущественно не на радиоволнах, а на тепло- вых с Я < 15 мкм. Телеуправление уступает самонаведению в точности, но имеет преимущество в значительно большей дальности действия. Другие преимущества: командное телеуправление производится как с неподвижного, так и с подвижного КП; оно отличается возможностью выбора любой, наиболее выгодной траектории и простотой бортовой аппаратуры управляемого ЛА. Радиотеленаведение имеет .преимущества перед командным ТУ-1, состоящие: а) в меньшем числе радиоканалов системы, особенно при однолучевой схеме; б) в упрощении бортовой аппаратуры УС за счет исключения из нее ответчика; в} в максимальной пропускной способности, что выражается в возможности одновременного управления несколькими снарядами, выпущенными против одной и той же цели. Основной недостаток наведения по радиолучу - заметное понижение точности управления по мере удаления ЛА от РЛС наведения. Телеуправление второго вида ТУ-2 реализуется, в частности, таким образом: на УС имеется устройство передачи телевизионного изображения цели на КП, где оператор по принятому изображению судит о взаимном расположении УС и цели; на.этом основании дается команда наведения, которая по радиолинии передается на УС и реализуется с помощью автопилота и рулей управления. Как видно, ТУ-2 и самонаведение обладают общим свойством - основные измерения рассогласования осуществляются на УС, но так как. система самонаведения проще и меньше подвержена помехам, то ТУ-2 применяется значительно реже. § 68. Радиовзрыватели [62J Эффективное поражение цели осколками снаряда требует примене-виЛ неконтактных взрывателей, предназначенных для подрыва боевого Ш 3 . 231 273 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 [44] 45 46 47 48 49 50 51 52 53 54 55 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||