
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 [46] 47 48 49 50 51 52 53 54 55 щ: I лометров, так как на больших вькотах не удается выявить весьма слабые отраженные сигналы вследствие их флуктуации и наличия вну-триприемных шумов. На таких высотах более пригодна радиоинер-циальпая система. § 70. .Радиолинии систем управления Для командного управления обычно требуется радиолиния для передачи плавных команд курса и тангажа и двух-трех разовых команд. Плавная команда означает, что ее значения плавно изменяются в пределах, соответствующих крайним положениям рулей управления. Разовые команды представляют собой дискретные кодированные сигналы, которые подаются для включения или выключения того или иного двигателя, отдельных приборов, системы ориентацип антенн и т.-д. Радиолинии контроля имеют в своем составе линии трансляции выходных данных системы траекторных измерений и радиотелеметрические линии, по которым сообщаются с ЛА и КП данные о состоянии здоровья экипажа, режиме полета ЛА, об окружающей среде и др. Так как по таким радиолиниям одновременно передается много различной информации, то они должны быть многоканальными. Разделение каналов может быть частотным, временным или логическим. При частотном уплотнении каждый канал имеет свою поднесущую частоту, относительно которой размещаются боковые частоты спектра данного канала. Затем этими спектрами модулируются колебания общей несущей частоты. На приемном конце радиолинии сигналы детектируются и с помощью частотных фильтров разделяются по каналам. При временном уплотнении передача и прием сообщений происходят последовательно с различных каналов. Поэтому таким способом можно передавать только дискретные сигналы или дискретные значения непрерывных величин. В случае логического уплотнения передача сообщений, как и при частотном уплотнении, происходит одновременно по всем каналам, но разделение каналов осуществляется логическими устройствами. Ознакомимся с одним из возможных вариантов командной радиолинии, связывающей КП с управляемым ЛА. Данная линия (рис. б. 19) предназначена для передачи и приема плавных команд управления по тангажу и курсу. Сигналы этих команд , к поступают из счетно-решающего устройства в преобразователь, где они подвергаются временному уплотнению. Этапы этого процесса следующие. 1. Генерирование последовательности тактовых импульсов хи с периодом Гти- 2. Временная импульсная модуляция .данной последовательности сигналами ки Нк, в результате которой получаются два рабочих импульса-Ыр и ри; из них первый соответствует входной команде по каналу тангажа и имеет временное положение Т\, Т{, а второйсоответ- ствует входной команде по каналу курса и имеет временное положение Ti, Ti. При изменении команд рабочий импульс Ыри перемещается в пределах первой половины, а рабочий импульс Ыри-второй половины периода следования Тти- 3. Импульсно-временное кодирование тактовых и рабочих импульсов, т. е. каждый из них преобразуется в свою кодовую группу импульсов. На временных диаграммах тактовый код тк составлен из трех равноотстоящих импульсов, а рабочие коды Ukv, к -из четырех импуль- Счетно-решающее устройство йреойразо Samefn и шифратор РаВиооеро- йатчик 7 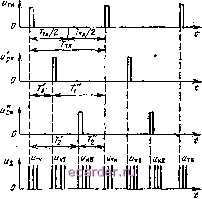 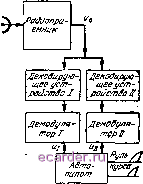 Руль тангата Рис. 9.19. Функциональная схема н временные диаграммы радиолинии командного управления. сов С различными интервалами. В сумматоре кодовые группы складываются ( s) и поступают в качестве модулирующего сигнала в радиопередающее устройство. На борту ЛА находится радиоприемное устройство, его выходные сигналы Но разделяются на два канала с помощью декодирующих устройств /, , за которыми следуют демодуляторы. В них восстанавливаются командные сигналы и/, иц, которые с помощью автопилота воздействуют на рули тангажа и курса. Поступающая по радиолинии информация иногда оказывается настолько большой по объему, что наряду с ЭЦВМ, обрабатывающей этот поток, приходится использовать специальное устройство запоминания оставшейся информации, которая обрабатывается позднее. В системах ближнего космоса поток информации больше, чем в системах дальнего космоса. Поэтому обычно в системах ближнего космоса используется импульсное широкополосное излучение, а в системах дальнего космоса- непрерывное узкополосное излучение [1]. § 71. Управление космическими аппаратами по данным траекторных измерений Для этой цели предусматривается командно-измерительный комплекс (КИК) и соответствующая бортовая аппаратура. В состав КИК входят измерительные пункты ИП1, ИП2, ИПз, ... и Координационно- Борт. К А
БАУТИ БНУТИ Двигатель ориентации Корректирующий ввигатель БУУРК и Буле - Датчики Гелефонная связь Телевидение
Ответный сигнап Запросный сигнал 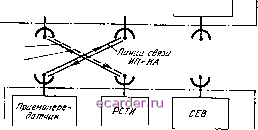 от ипг к тг
Линия связи mf-квц Пункт управления от тз ктз Рис. 9.20. Функциональная схема командно-измерительного комплекса и бортовой аппаратуры системы управления КА. вычислительный центр (КВЦ), охваченные линиями связи (рис. 9.20). В некотог bif К ИК входят не только наземные, но и самолетные и корабельные измерительные пункты. 282 Основой каждого ИП является радиотехническая система траекторных измерений (РСТИ). Это может быть одно- или многопараметрическая система. Однопараттрическая определяет траекторию КА с помощью нескольких разнесенных РЛС, изл!еряющих одновременно один и тот же параметр, например дальность КА. В многопараметрической системе все шесть параметров одновременно определяются из одного пункта одной, достаточно сложной по своей структуре РЛС. Возможно и такое решение: сократить число измеряемых координат и скоростей за счет использования другого параметра - времени, т. е. траекторию определять по измерениям меньшего (чем шесть) числа параметров, произведенным с одних и тех же ИП, но в разные моменты времени, а следовательно, в разных, точках орбиты данного КА. Выходные данные РСТИ должны иметь цифровую форму, так как они вводятся в ЦВМ измерительного пункта. Здесь результаты траекторных измерений накапливаются и усредняются. Это повышает точность системы и позволяет уменьшить емкость линии связи ИП-КВЦ. К той же линии подводится телеметрическая информация, принятая с борта КА антенной радиолинии ИП-КА. Важную роль играет служба единого времени (СЕВ), представляющая собой совокупность весьма точных электронных часов, находящихся на всех ИП и борту КА и согласованных по сигналам точного врема-ни. Эти сигналы поступают от специального радиопередающего устройства к приемным устройствам СЕВ. Благодаря СЕВ измерительная информация дополняется еще одним параметром - временем, к которому относят каждый усредненный результат траекторных измерений. Со всех ИП измерительная, телеметрическая и вспомогательная (в частности, данные СЕВ) информация концентрируется в КВЦ. Здесь производится ее вторичная обработка: сопоставляются данные о движении КА, полученные от ИП, уточняется, отображается и регистрируется траектория, прогнозируется дальнейшее движение КА и на основании этого вырабатываются указания измерительным пунктам. Командно-измерительные комплексы могут не содержать КВЦ. Тогда обработка информации, производимая в пределах данного ИП с помощью ЦВМ и отображаемая на пункте управления, предназначается не для передачи в КВЦ, а для целеуказаний станциям данного измерительного пункта. Основные расчеты на борту КА производятся бортовой цифровой вычислительной машиной (БЦВМ). Последняя связана с источниками входных данных и потребителями выходных данных непосредственно или через устройства преобразования сигналов (БУПС), уплотнения и распределения каналов (БУУРК). Каждому маневру КА предшествует ориентация аппарата. БЦВМ рассчитывает команды, подаваемые двигателю ориентации согласно измерениям, производимым системой астроориентации.Основой этой системы являются секстанты. В зависимости от применяемой системы траекторных измерений БЦВМ связывается через бортовое устройство преобразования сигналов, уплотнения и распределения каналов с бортовым автономным (БАУТИ) или неавтономным (БНУТИ) устройством траекторных измерений. В первом случае используется программа, хранимая в блоке памяти БЦВМ, и параметры движепия КА, измеренные БАУТИ. Во втором случае используются команды, передаваемые с измерительных пунктов по радиолинии ИП-КА и данные БНУТИ. Корректирующий двигатель исполняет команды, окончательно рассчитанные БЦВМ. Телеметрическая информация, поступающая от различных датчиков, телефонные и телевизионные сигналы - все это проходит через устройства преобразования, распределения и уплотнения, имеющиеся в КВЦ, ИП и на борту КА. Преобразование сигналов связано с их кодированием и декодированием, а уплотнение и распределение каналов вызвано необходимостью передачи обширной информации по одной или немногим линиям связи. Кодирование, кроме того, улучшает качество связи. Как видно, роль БЦВМ в управлении КА очень велика. Достаточно сказать, что вычисления должны производиться с относительной ошибкой не более 10 - 10 ®, а быстродействие исчисляется сотнями тысяч операций в секунду, и все это совмещается с требованиями обширного объема памяти, малых габаритов и веса и высокой надежности вычислительной маишны. Раздел iV РАДИОЛОКАЦИОННЫЕ УСТРОЙСТВА Глава 10. НАЗЕМНЫЕ И СУДОВЫЕ РЛС По назначению наземные радиолокаторы разделяются на РЛС дальнего обнаружения самолетов и ракет; РЛС обнаружения воздушных целей и наведения на них истребителей; РЛС орудийной наводки и наведения зенитных управляемых ракет; РЛС управления воздушным движением; метеорологические РЛС и др. Рассмотрим особенности и тактико-технические данные некоторых из этих станций. § 72. Наземные РЛС обнаружения воздушных целей противника и наведения на них истребителей-перехватчиков Это обычно импульсные или импульсно-допплеровские РЛС с системой СДЦ. Если максимальная высота полета самолетов противника Н = 20-30 км, а высота антенны РЛС h <Н, то предельная дальность действия РЛС Длред (км)=4,12 {У1Щ+УШ) 4,12 утт = = 4,12]/{20-30)-10з =580-713 км. Дальности Дпред соответствует предельно допустимая частота следования импульсов спред = с/2Д -- = 3- 10V2 (580 - 713). 10= ~ 210 - 260 Гц. Максимальная,дальность действия РЛС Дмако не может быть больше предельной дальности Дпред- Вместе с тем величина Дмакс должна быть достаточно большой, чтобы цели, летящие со скоростью Уц, не успели за время развертывания средств ПВО приблизиться к защищаемому объекту на расстояние Дмин, на котором еще можно уничтожить данную группу противника с заданной вероятностью. Следовательно, Дмакс Дмин + Ицоб- Сектор обзора желательно иметь равным 360° по азимуту а и 90° по углу места Р, но поскольку на рубеже перехвата Дмин самолеты противника переходят под контроль РЛС зенитных орудий, то можно огра- ничить обзор по углу места до = 45° При данной высоте полета воздушной цели Н угол р возрастает с приближением цели к РЛС (уменьшением ее наклонной дальности Д). Из рис. 10.1 видно, что Р = arc sin (Я/Д). (10-1) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 [46] 47 48 49 50 51 52 53 54 55 |
|||||||||||||||||||||||||||