
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 [47] 48 49 50 51 52 53 54 55 Следовательно, максимальный угол места воздушной цели Рма о соответствует наибольшей высоте Яма КС и минимальной дальности Дм н. а угол р 1,ц соответствует высоте Я ин и дальности Дманс: Рмакс == arc sin 3м п = агс5!п мин / (10.2) (10.3) \ Дмакс 2/?з Вычитаемым в (10.3) учитывается уменьшение угла Рмин за счет кривизны земной поверхности (радиус Земли = 6370 км, но если иметь в виду нормальную атмосферную рефракцию, то принимают R, = 8500 км). н > н чр , V Пусть Я ин = 10 Тогда км; Ямакс = 25 км; Д н = 90 км; Д 5 == 250 км. Рмин = IIS, % = 16°. При очень ность действия малых РЛС, 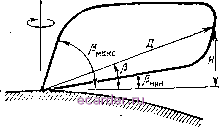 углах места облучаемой цели даль-как показывает диаграмма видимости, резко уменьшается, и поэтому приходится принимать особые меры для обнаружения низколе-тяш,их целей (Я < 300 м). Азимутальную ширину диаграммы направленности 2ф выбирают исходя из заданной разрешающей способности по азимуту. Отсюда достаточно ширины диаграммы направленности 2ф в несколько градусов, при кото-Рис. П0.1. Диаграмма видимости РЛС рдй азимут измеряется С точно-обнаруЖния воздушных целен. 0,1-0,5° [13]. Диаграмма направленности РЛС должна иметь форму веера, сжатого в горизонтальной плоскости; тогда можно применить круговой обзор как наиболее быстрый. При больших скоростях современных самолетов период обзора Гобз должен длиться не более 10 с, чтобы избежать пропуска цели или поступления информации о ней с большими интервалами. Для измерения трех координат целей недостаточно плоской ДН. Нужно применить обзор пространства F-лучом, парциальными диаграммами или применить систему РЛС, в которой одна совершает круговой обзор вокруг вертикальной оси с помощью ДН, сжатой в горизонтальной плоскости, а другая (их может быть несколько) совершает секторный обйор вокруг горизонтальной оси с помощью ДН, сжатой в вертикальной плоскости. При этом первая РЛС измеряет дальность и азимут цели, а вторая - высоту и дальность. Если индикаторы обеих радиолокационных станций показывают одинаковую дальность цели, то азимут и высота, измеренные индикаторами, относятся к той же самой цели. При неавтоматическом обнаружении сигналов основным выходным устройством РЛС обнаружения и наведения является индикатор кругового обзора. По мере развития радиолокационной техники в РЛС обнаружения и наведения все больше используются радиоимпульсы с внутренней модуляцией, оптимальная обработка сигналов и ввод выходных данных в вычислительное устройство. Этим достигаются достаточно большая дальность обнаружения целей, высокая точность измерения и наведения, высокая разрешающая способность и быстрый темп выдачи данных. § 73. РЛС наземных зенитных ракетных комплексов ближнего действия 70, 71, 72] Зарубежные военные специалисты придают большое значение зенитным ракетным комплексам (ЗРК) как средству борьбы с самолетами противника и уничтожения баллистических ракет ближнего действия. В состав комплекса входят управляемые снаряды поверхность-воздух , установки для запуска этих ракет, наземные РЛС обнаружения, целеуказания и сопровождения, аппаратура управления огнем и др. На рис. 10.2 представлена функциональная схема зенитного ракетного комплекса Хок (США). Имеются отдельные РЛС для обнаружения удаленных на большие расстояния высоколетящих целей и для обнаружения низколетящих целей. Первая РЛС - импульсная с системой опознавания свой-чужой , а вторая - с непрерывным излучением, где используется эффект Допплера для селекции сигналов маловысотных целей из помех, вызванных отражениями радиоволн от местных предметов. Синхронное вращение антенн этих РЛС, происходящее со скоростью 20 об/мин, облегчает сопоставление информации о целях, получаемых с помощью обоих радиолокаторов. В данном комплексе применяется полуактивное самонаведение УС. Оно осуществляется бортовой аппаратурой УС по сигналам, отраженным от цели, которая облучается наземной РЛС подсвета. Эта РЛС работает в режиме автосопровождения цели при непрерывном излучении. Информация о целях, полученная обеими РЛС обнаружения и опознавания (/) и поступающая от КП системы ПВО (2), является исходной для целеуказания (3), которое направлено к РЛС подсвета аппаратурой управления огнем, В ответ на это РЛС подсвета выдает данные (4) о сопровождаемой цели. На их основании азимут цели вводится в радиодальномер (5) для наведения его антенны на ту же цель. Вместе с тем от РЛС подсвета поступает к стартовой установке сигнал (6) для подготовки к запуску УС; кроме того, при наличии помех следует запрос (7), на который дальномер сообщает точное значение координаты дальности (S), необходимое для селекции сопровождаемой цели по дальности. Аппаратура управления, учитывающая в расчетах все эти данные и координаты (9) стартовой установки, вырабатывает команду {10) на пуск ракеты. Более совершенный ЗРК типа SAM-D разрабатывается в США с 1967 г 172]. Отличительные черты этого комплекса: а) многоцелевое назначение - борьба с самолетами, летящими на больших, средних и малых высотах, и с баллистическими ракетами тактического значе- РЛС однаруже- НиЯ ffb/COHO- летящих целей Рло одеаруже-ния низ/го-летясцих целей  Аппаратура управления огнем 3 Y Х± Радиодальномер РЛС подсвета Стартовые i/станов/ги Рис. 10.2. Функциональная схема зенитного ракетного комплекса. ния; б) высокая мобильность - весь комплекс смонтирован на транспортерах; в) высокая надежность при малых габаритах, достигаемая применением микроэлектронных твердотельных элементов; г) значительное сокращение обслуживающего персонала за счет широкой автоматизации. Для действий на поле боя этого комплекса достаточно трех самоходных машин. На одной из них смонтированасистема управления огнем, на второй - пусковая установка и на третьей - центр управления. В систему управления входят многофункциональная РЛС, работающая в диапазоне частот 1550 - 5200 МГц, счетно-решающее устройство, средства связи и агрегат питания. Достаточно сказать, что РЛС осуществляет обнаружение, опознавание целей, слежение за ними и обеспечивает командное наведение с Земли и полуактивное самонаведение УС. Это Эквивалентно девяти обычным РЛС, выполняющим раздельно функции обнаружения, опознавания и т. д. Большую роль в совместном решении перечисленных задач играет антенна РЛС, представляющая собой фазированную решетку из многочисленных активных элементов. Каждая линейная решетка имеет свой передатчик и приемник. Суммарная средняя мощность излучения около 50 кВт. Сканирование электронное с помощью ферритовых фазовращателей. Последние коммутируются диодами по управляющим chf- налам счетно-решающего устройства. Антенная решетка крепится на механически вращающемся оснований, благодаря чему можно изменять ее положение. Вес станции около 4,5 т. Транспортер с пусковой установкой содержит также шесть ракет с обычным или ядерным зарядом и связную аппаратуру. Третий транспортер перевозит быстродействующее счетно-решающее устройство, аппаратуру радиосвязи и все остальное, что необходимо для координации ведения огня батарей. Связь в комплексе радиотелефонная; передача производится в цифровой форме. § 74. РЛС противоракетной обороны [73, 74, 75, 9, 27, 29] Из станций дальнего обнаружейия особый интерес представляют РЛС противоракетной обороны (ПРО). Баллистические ракеты (БР) - самое грозное современное оружие: они управляемы, имеют дальность действия до 16 ООО км и более, полет ракеты совершается преимущественно в разреженной атмосфере со скоростью 6,8-7,9 км/с на высоте 1300-1400 км; головная часть ракеты имеет сравнительно малую поверхность и может появиться с любого направления. Такую цель, естественно, очень трудно уничтожить, а это крайне необходимо для обороняющейся стороны, особенно если ракета несет атомный заряд. Для ПРО решающее значение имеет максимальная дальность действия РЛС обнаружения. При высоте полета БР, равной 1400 км, предельная дальность обнаружения, обусловленная сферичностью Земли: Дпред = 4.181/Я(мГ=4,18У1,4.10 =4932 км. Исходя из этого РЛС обнаружения ракет проектируют на максимальную дальность действия Дмакс ДО 5000 км. Имеются системы ПРО двух видов: дуэльного и экранирующего. Дуэльная ПРО предусматривает уничтожение ракет противника встречными антиракетами, которые запускаются с наземных или подземных установок по командам и программам, вырабатываемым соответствующей аппаратурой. Экранирующая ПРО означает, что имеется несколько тысяч ИСЗ, из которых, по крайней мере, один способен в данный момент времени поразить баллистическую ракету противника по команде с Земли. Обратимся к ПРО дуэльного типа.> Боевые посты ПРО являются частью системы ПВО страны (континента). В эту систему входят посты раннего обнаружения, выдвинутые далеко за пределы границ страны (континента), оперативный центр управления с быстродействующими ЭВМ и система связи. Центр управления исходя из информации, поступающей от постов РЛС раннего обнаружения, поручает определенному боевому посту ПРО дальнейший поиск БР противника в направлении предполагаемого полета этой цели. Расположенная на боевом посту (рис. 10.3) РЛС обнаружения име- -ет меньшую дальность действия (около 1600 км), чем РЛС раннего обнаружения [29]. Выходные данные ЭВМ обнаружения, с которой сопрягается РЛС того же назначения, поступают в РЛС опознавания и в основную ЭВМ поста. Задача РЛС опознавания заключается в том, чтобы по характеру флуктуации отраженных сигналов и другим признакам отличить сигналы головной части БР от сигналов ложных целей, но этим не ограничиваются при опознавании целей. Основная ЭВМ совершаег логическую операцию сравнения параметров целей, установленных по выходным данным РЛС обнаружения и опознавания, с параметрами БР противника, записанными в блоке памяти ЭВМ. Если сравнение покажет, что 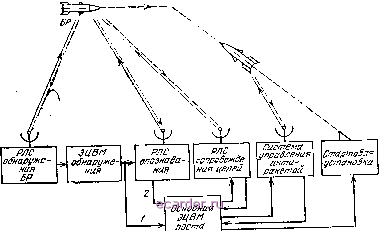 Рис. 10.3. Функциональная схема бревого поста ПРО. среди обнаруженных сигналов имеются отраженные от БР противника, то данные этой цели вводятся в РЛС сопровождения, предназначенную для точного измерения текущих координат и параметров полета БР. По результатам измерений основная ЭВМ рассчитывает траекторию БР и вычисляет наиболее выгодный момент для старта антиракеты. Соответствующая команда подается на стартовую установку. Наземная часть системы управления антиракетой рассчитана на командное радиоуправление ТУ-1. Поэтому в ее состав входят радио-визиры. с дальностью действия около 300 км и передатчик командной )адиолинии. Команды управления рассчитываются основной ЭВМ. адиовизиры цели и антиракеты моноимпульсные, первая работает по отраженному сигналу, вторая - с использованием ответчика на антиракете. § 75. Наземные РЛС обеспечения полетов В эту группу входят следующие РЛС: обзорные, диспетчерские, посадочные и наблюдения в зоне аэропорта. Обзорные и диспетчерские РЛС предназначены для контроля и управления воздушным движением, но диспетчерские РЛС охватывают зону радиусом 100-150 км, а обзорные - радиусом 500 км. Посадочные радиолокаторы служат для контроля и руководства посадкой самолетов с помощью радиотехнических средств. РЛС наблюдения в зоне аэропорта позволяет руководить движением самолетов и транспорта в аэропорту и вблизи от него. Все эти РЛС, поскольку они управляют движением своих самолетов, могут работать с активным ответом. Отсюда - большая дальность действия. Например, в автоматизированном радиолокационном комплексе Утес обзорная РЛС имеет Д ако = 450-500 км при вероятности = 80% по самолету с 5эф = 10 м, летящему на высоте Я = 25 км. Это достигается работой РЛС на двух частотах дециметровых волн при Ти = 3 и 1,5 мкс; = 250 и 750 Гц, мощности Яи = 6 МВт, которая поступает от передатчика с импульсным клистроном на выходе каждого канала в антенну с отражателем двойной кривизны (параболоид, тор) размерами 18 X 10,5 м. Двухканальный приемник чувствительностью -3,5 дБ рассчитан на СДЦ для подавления пассивных помех от местных предметов. Как пассивный радиолокатор Утес определяет дальность и азимут, а как активный - еще и высоту самолета, его бортовой номер и запас горючего. После первичной обработки эта информация поступает в цифровой форме в ЭЦВМ. Вместе с тем имеется выход на ИКО с экраном диаметром йх, = 450 мм и добротностью ЭЛТ = 750 [59]. Диспетчерские РЛС аналогичны обзорным, но так как их дальность действия меньше, то они работают на сантиметровых волнах и уступают им в мощности передатчика, чувствительности приемника и усилении антенны. Антенные системы должны быть рассчитаны на переход от линейной поляризации волн к круговой, когда требуется подавление помех от гидрометеоров. Кроме того, принимаются меры для предельного ослабления боковых лепестков диаграммы направленности во избежание запуска самолетных ответчиков с боковых направлений. По рекомендациям Международной конференции по воздушной радионавигации, аэродромные РЛС должны иметь сектор обзора по азимуту - 360° и по углу места - от 2 до 25-30°, разрешающую способность - не более 400 м по дальности и 2° по ?зимуту, точность измерения - не хуже 400 м по дальности, Г - по азимуту и 300 м - по высоте (при Я = 3 км, Д = 30 км и 6 = 2-25°), период обзора- до 15 с [76, 33]. От РЛС наблюдения в зоне аэропорта требуется небольшая дальность действия (несколько километров), поэтому удается значительно улучшить остальные показатели, особенно важные для станции такого назначения. Примером тому может служить РЛС типа ASDE [401, работающая на миллиметровых волнаХ. Ее несущая частота /о = 24 ГГц (ко = 1,25 см). При столь высокой частоте сравнительно небольшая антеннас рефлектором 3,6 X 1,2 м имеет диаграмму направленности шириной 0,25° по азимуту и 1° по углу места. В результате разрешающая способность по азимуту достигает 0,25°, что соответствует дуге 3 м на дальности 700 м. В отсутствие атмосферных осадков применяются линейно-поляризованные волны, а при наличии осадков - волны с круговой поляризацией. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 [47] 48 49 50 51 52 53 54 55 |