
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 [50] 51 52 53 54 55 компенсируются положительными видеоимпульсами, задержанными линией на то же время (1 мкс). Поэтому импульсы, отраженные от Земли, не выделяются на катодной нагрузке R11, тогда как видеоимпульсы 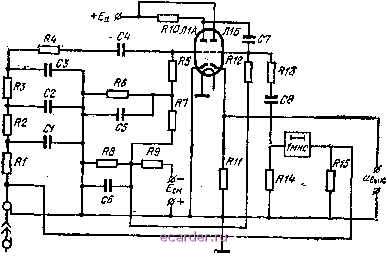 IС Выхода приемнина Рис. 11.4. Принципиальная схема каскада подавления импульсов, отраженных от Земли. цели, поступающие на сетку Л1Б через линию задержки, ничем не компенсируются (Л1А заперт). Они воспроизводятся на выходе катодного повторителя ( вых) и далее поступают в индикатор РЛС. § 81. РЛС защиты летательных аппаратов [13, 33, 68] Для защиты от атаки истребителей бомбардировщики и военно-транспортные самолеты оборудуются средствами создания радиолокационных помех и стрелковым оружием, которое в большинстве случаев размещается в кормовой части защищаемых самолетов. РЛС предупреждения и радиолокационный кормовой прицел составляют радиолокационный комплекс защиты ЛА. РЛС предупреждения сравнительно несложная по своему построению. Зона обзора ее, равная 360 по азимуту и ±. 45° по углу места, определяется направлениями возможной атаки истребителей. Подготовка к атаке и атака требуют работы РЛС истребителя. Это позволяет ис-ключить передающую часть и применить приемное устройство с дальностью действия, на 25-50% большей дальности действия РЛС истребителя. Дальнейшее повышение чувствительности приемника РЛС предупреждения нежелательно, так как это может вызвать прием излучения, не исходящего от аппаратуры истребителя. Следует к тому же учесть, что от РЛС предупреждения требуется только обнаружить 304 истребитель и ориентировочно с. точностью ± (30-45°) установить угловой сектор, в котором он находится. Из этих соображений РЛС можно выполнить как многоканальную (4-6 каналов) с детекторным широкополосным приемником в каждом канале. Функциональная схема одного канала показана на рис. И.5. Рупорная антенна ориентирована на прием в одном из угловых секто- Детектор Импрльоы санхрониэации
Рис. 11.5. Функциональная схема приемного канала 1ЛС предупреждения. ров шириной 60-90°. Детектор преобразует принятые радиоимпульсы в видеоимпульсы, которые после усиления расширяются по длительности для более уверенной индикации. Предусматривается световая индикация с помощью лампочки накаливания и звуковая индикация
Система управления оружием Рис. П.6. Функциональная схема сопряжения радиолокационного прицела с системой огневой защиты самолета. с помощью генератора низкой частоты, который возбуждается под воздействием видеоимпульсов от приемника. Если сигналы прерывистые, то это признак того, что РЛС обнаруженного истребителя работает в режиме об.зора, а если непрерывные, то в режиме автосопровождения. Видеоусилитель запирается схемой блокировки на время излучения импульсов данной бортовой РЛС. Это исключает возможность получения ложных сигналов предупреждения, вызванных бортовой аппаратурой защищаемого самолета. Радиолокационный прицел кормовой стрелковой установки имеет много общего с РЛС перехвата. Различия определяются в основном тем, что первый используется для управления пушкой, защищающей сялолет со стороны кормовой част11, а вторая - для управления снарядами атакующего истребители. В режиме обзора дальность действия этих РЛС примерно одинаковая - 10-15 км. Отличия имеются в выходном устройстве. Индикатор радиолокационного прицела играет вспомогательную роль. Его назначение - индицировать цели и их координаты на экране, чтобы ориентировать экипаж самолета в окружающей обстановке. Управляющее напряжение для стрелковой установки упр (рис 11.6) поступает из системы управления оружием, которая действует согласно расчетам, производимым вычислительным устройством. В это устройство вводятся исходные данные: дальность, углы, радиальная и угловая скорости цели - от соответствующих систем РЛС; высота, продольный и поперечный крены защищаемого самолета - от соответствующих датчиков. Оружие наводится согласно управляющему напряжению Ыур, а огонь открывается при получении определенного, напряжения дальности цели. § 82. Некогерентныё РЛС кругового и бокового обзора [79, 80, 9, 14, 18, 48, 68] К РЛС землеобзорэ относятся, как известно, бортовые РЛС кругового и бокового обзора, которые называются иначе панорамными радиолокаторами. Их назначение - картографирование местности, воздушная разведка, навигация по наземным ориентирам и радиолокационным маякам, точное метание бомб и торпед, независимо от оптической видимости. Панорамные радиолокаторы особенно полоны в районах, где нет или очень мало наземных средств навигации, и при полетах над территорией противника. 82.1. Самолетные РЛС кругового обзора. В таких РЛС антенна с веерной ДН, сжатой в горизонтальной плоскости, совершает круговой (рис. 11.7) или секторный обзор земной поверхности. Отраженные сигналы воспроизводятся на ИКО. Наиболее отчетливо видны на экране границы между водой и сушей. Гладкая водная поверхность дает зеркальное отражение, а земная поверхность, поскольку она неровная и по характеру неоднородная, рассеивает волны во всех направлениях. В результате изображение земной поверхности получается в виде более или менее ярких массивов, на которых выделяются отметки возвышенных участков и обладающих высокой проводимостью объектов (крыши зданий, металлические конструкции). Имеет значение и угол падения, например волны, падающие на гладкую поверхность перпендикулярно, отражаются обратно к антенне РЛС, и изображение этого участка получается ярким. Задачи, решаемые панорамными радиолокаторами, требуют очень высокого разрешения целей, чтобы можно было в любое время суток в любых метеорологических условиях получить изображение местности, близкое по качеству к аэрофотоснимкам. Если умножить ширину диаграммы направленности по азимуту 2фо,5, выраженную в радианах, на дальность цели Д, тополучим дли* ну дуги луча в месте соприкосновения его с целью (рис. 11.8). Это и будет разрешаемое расстояние по азимуту ЛДа при наклонной дальности Д. Учитывая, что 2фо g = Шд, где - ширина раскрыва антенны, можем записать АДа = 2фо,5Д = mdx. (11.2) Как видно, величина АД зависит от дальности Д. Даже при малой длине волны Я, = 2 см и большой (для самолетной вращающейся антенны) ширине раскрыва = бОК = 120 см, обеспечивающих сравнительно узкую диаграмму направленности 2фо 5=Шд = = 2/120 = 1/60 [рад] ~ 1\ линейная разрешающая спосрбность по азимуту оказывается низкой, например на дальности Д = 90 км ДД =2фо,5Д =90/60= = 1,5 км. Для сравнения обратим внимание на то, что при длительности Ти = 0,1 мкс разрешение по дальности в сто раз выше: ДДмин п = <и/2 15 м. 82.2. Режимы работы индикатора. Ин-. дикаторы РЛС кругового обзора работают в различных режимах: при наличии кольца высоты, с закрытым центром, в режимах кругового вращения луча антенны, секторного вращения луча, с норма:льным центром развертки вынесеннцм центром и др. Если радиальная развертка (tp) начинается одновременно с излучением радиоимпульса передатчика (t = to на рис. 11.9, а), то в ИКО вокруг центра экрана образуется темное пятно, называемое кольцом высоты. Причина этого в том, что первый отраженный сигнал Рис. 11.7. Связь между панорамой местности, облучаемой самолетной РЛС кругового обзора, и изображением на экране ИКО. 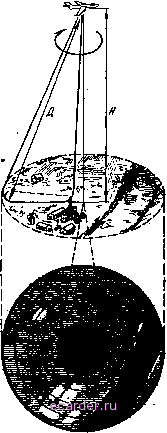 принимается не ранее чем через время ?i - io = 2Я/с, необходимое для распространения радиоволны на удвоенную высоту полета самолета. Чтобы полнее использовать экран, прибегают к закрытию центра: развертка задерживается на время 2Н/с относительно зондирующего импульса, в результате чего кольцо высоты стягивается к центру экрана (рис. 11.9, б). Для измерения с повышенной точностью расстояния до цели, удалённой более чем, скажем, на 20N км, где Л/ = 1, 2, 3.....используют задержку развертки, большую чем на время 2Н/с, а именно на - to=* = 2 (20 N/c), где скорость с выражена в км/с (рис. 11.9, в). При этом дальность цели определяется суммой отсчетов шкал схемы задержки (20 N км) и индикатора. Первая задержка ступенчатая (кратна 20 км), а вторая - плавная. Режим с открытым центром заключается в том, что начало развертки не только не отстает от зондирующего импульса (/q), но даже опережает его (рис. 11.9, г). Поэтому темное кольцо высоты (Я) больше, чем на рис. 11.9, а, и нулевой дальности соответствует не центр экрана, а кольцо передатчика . Столь малое использование площади экрана компенсируется повышенной различимостью по азимуту близко расположенных целей. Для сокращения периода обзора предусматривается качание антенны в заданном секторе, и тогда на экране ИКО наблюдается только сектор обзора. 82.3. Гиперболическая развертка. Панорамная РЛС решает задачи навигации тем успешнее, чем полнее соответствие между изображением на экране индикатора и расположением объектов на местности. Для этого должен быть постоянным радиальный масштаб по горизонтальной дальности т,., а не по наклонной /Ид, как для других видов РЛС. Если приращению радиуса развертки Дг соответствуют приращения наклонной ДД и горизонтальной ДДг дальностей, то 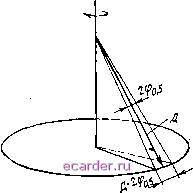 Рис. 11.8. Луч антенны самолетной РЛС кругового обзора. /Пд = Дл/ДД; т, = Дг/ДД (11.3) но так как Д = / Д - Я, то r = m,R, = m,V JX-H =т,Д)/1-ЯД Обозначив через tn и t время распространения электромагнитной волны соответственно на удвоенную высоту 2Я и расстояние 2Д, получим г = т, сЦ2 Yl -(ct /2)V{2lctf = m, ct/2 Yl-tyt. По условию, масштаб m должен быть постоянным. Кроме того, постоянны tn (при данной высоте Я) и с. Это позволяет считать величину т/2 = А постоянной и убедиться, что движение луча по радиусу экрана г с течением времени t должно происходить по гиперболическому закону (11.4) r = At vl-tU Зависимость (11.4) иллюстрируется рис. 11.10, б. При Я=0 время tH =2Hlc=0 и r=At, т. е. идеальная развертка линейная, как это неоднократно отмечалось. Когда самолет находится на высоте 1 1 to 2Н\1 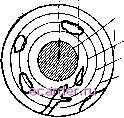 высоты- +30/ftf.  I H+20KM н+ttDHM H+SOm 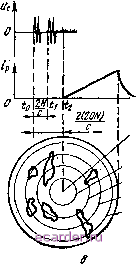 0 i h ZONm  (20/f+20)H/i (20М*Ъ0)нм Рис. 11.9. Режимы работы ИКО. Кольцо переШтчша (Д-0) Ндльцовысши Н ФО, развертка должна начинаться в момент / = /я. Такой вывод следует хотя бы из того, что при > / подкоренное выражение формулы (11.4) становится отрицательным, а г - мнимым. С течением времени (/>/н) отношение / постепенно уменьшается и зависимость 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 [50] 51 52 53 54 55 |
|||||||||||||||||||||||||