
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 [53] 54 55 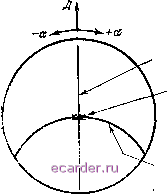 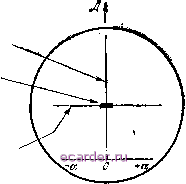 Когда дальность цели Д становится равйой дальности сбрасывания Дсбр, вырабатывается импульс, который подается из СРП в электросбрасыватель бомб и ракет (ЭСБР). Если отметка цели и поперечная метка не совпадают, как на рис. П. 18, б, то оператор добивается нх совпадения (рис, 11.19) поворотом ручки визирование , от которой косвенно регулируются время задержки / 8 в РБП и положение визира в ОПБ, Если нарушается совпадение импульсов с и пм> ручкой синхронизация вводятся коррективы в расчеты, связанные с путевой скоростью самолета. ЙрЬдоАьные метки Цель Поперечные, кетни Рис. 11.21. Экраны индикаторов радиолокационного бомбоприцела: ИКО с вынесенным центром (а); с прямоугольным растром (б). Итак, прицеливание сводится к трем операциям: развороту самолета до совпадения отметки цели с продольной меткой бомбометания; поворотом ручки визирование отметка цели доводится до пересечения о поперечной меткой бомбометания; ручкой синхронизация не допускается уход от перекрестия отметки хели. Цель и метки бомбометания изображаются одинаково на экране индикатора и отражателе оптического прицела. Благодаря этому штурман совершает одинаковые операции прицеливания по РБП и ОПБ, В режиме прицеливания целесообразно использовать ИКО с вынесенным центром (рис. 11.21, а) или индикатор дальность - азимут в прямоугольных координатах (рис. 11.21, б), поскольку при этом представляет интерес только небольшой сектор пространства. 84.3. Функциональная схема РБП, На рис, 11.22 показаны функциональная схема РБП и соответствующие ей временные диаграммы. Синхронизатором служит кварцевый генератор, синусоидальные колебания которого (эпюра /) отличаются высокой стабильностью частоты. Этими колебаниями синхронизируются делители частоты с коэффициентами деления 1:1, 1:5, 12, предназначенные для генерирования остроконечных импульсов с интервалами, соответствующими дальностям 2 км (эпюра 2), 10 км (эпюра 5) и 20 км (эпюра 4). Делителями 0® ®® Схет на гот Перв-датчШе \Н 14 Ч Ге ер rspam  Антвнно-орнт ic/nSa Примтн \ к эсер генератор , CuHxpmigiiiiS. @ t @  ® 1 ®; ®:t iiiiiiiiiiiiiiiiiiiiiiiiiiimiiiiiiii , 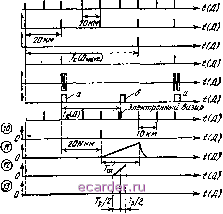 Рнс. 11.22. Функциональная схема самолетного радиолокационного бомбоприцела (а) п соответствующие временные диаграммы (б). 4499999999999 служат блокинг-генераторы. Коэффициент деления 1 : 1 означает, что первый блокинг-генератор работает в режиме синхронизации от кварцевого генератора. Для этого частота кварцевого генератора устанавливается равной примерно 75 кГц. Используются 2-, 10- и 20-км импульсы для получения масштабных меток на экране ИКО. Далее следует делитель частоты с коэффициентами деления 1 :6, 1 : 13, 1 : 25, на выходе которого получаются управляющие импульсы (эпюра 5), которыми запускаются передатчик и генераторы ступенчатой и плавной задержки развертки индикатора. Коэффициенты деления 1:6, 1 : 13, 1 : 25 соответствуют трем режимам: прицеливание ( Пр ), в котором требуегся наименьшая дальность действия РЛС (до 20 X 6 = 120 км), поиск ( П ) (дальность до 20 X 13 = 260 км) и навигация по маякам ( ИМ ) (наибольшая дальность действия до 20 X 25 = 500 км). В результате частота следования управляющих импульсов Fc = 1/7 оказывается равной 1250 Гц (для режима прицеливания), 600 Гц (для режима поиск ) и 300 Гц (для режима навигации по маякам). При индикации с открытым центром импульс передатчика (эпюра 7) должен опережать импульс развертки; на этот случай предусмотрена схема задержки на 20 км управляющего импульса (эпюра 5) перед запуском им передатчика (эпюра 6). На выходе приемника получаются видеоимпульсы (эпюра 5): опорный (а) и цели (б). Они смешиваются в видеоусилителе с импульсами масштабных меток (эпюра 9), переключаемыми посредством В1, и с импульсом электронного визира, задержка которого плавно регулируется потенциометром R1. Электронный визир должен быть совмещен с отметкой цели. В зависимости от дальности цели генератор импульсов визира запускается либо одновременно с передатчиком, либо ступенчато-задержанными импульсами (эпюра 10). Величина ступенчатой задержки (20, 40, 20N км) определяется положением переключателя В2 (на эпюре 10 N == \). Дальность цели определяется суммой показаний шкал переключателя В2 и потенциометра R1 ( дальность ). Запуск развертки дальности (эпюра ) производится ступенчато-задержанными импульсами (в положении Ст переключателя ВЗ) й плавно задержанными импульсами (в положении Пл того же переключателя). Величина плавной задержки, которая используется только на малых дальностях, регулируется потенциометром R3. Все это относится к режимам поиска и навигации, когда переключатели В4 и В5 находятся в положении П, НМ . Если же РЛС работает в режиме прицеливания, то ступенчатая задержка не требуется, переключатель ВЗ находится в положении Пл , переключатели В4 и В5 переводятся в положение Пр и величина плавной задержки развертки дальности (эпюра 12) задается напряжением, поступающим из блока связи с ОПБ. Напомним, что это напряжение пропорционально наклонной дальности цели, которая рассчитывается с помощью счетно-решающего прибора ОПБ и блока связи с ОПБ. С этого же блока в канал развертки вводится напряжение, пропорциональное углу а + у, для поворота изображения, производимого для прицеливания по направлению. Что касается поперечной метки, тре- буемой для прицеливания по дальности, то она создаегся генератором, который запускается с постоянной задержкой по отношению к началу развертки дальности. Импульс поперечной метки (эпюра 13) совпадает по времени с серединой этой развертки и поступает на ЭЛТ совместно с выходными импульсами приемника. Для развертки по азимуту предусмотрена механическая связь отклоняющей системы ЭЛТ или ротора сельсин-трансформатора с ан-тенно-волноводным устройством. 84.4. Технические характеристики РБП и его блоков [13]. РБП работают на волнах Я = 2-4 см. При Я > 4 см не удается получить требуемые разрешающую способность и точность измерений по направлению, а при Ж 2 см невозможно обеспечить требуемую дальность поиска и навигации из-за чрезмерных потерь энергии в атмосфере. Длительность радиоимпульсов т выбирается минимальной в режиме прицеливание и максимальной в режиме маяк , так как в первом случае важна разрешающая способность по дальности, а во втором важен высокий энергетический потенциал РЛС для обеспечения требуемой дальности действия. Этот потенциал определяется супергетеродинным приемником высокой чувствительности (Рсмин= 10-12-10-1 Вт) и магнетронным передатчиком с мощностью в импульсе Ра яо ста и более киловатт.. Скважность импульсов (7 =1/T f с во всех режимах работы РЛС одинаковая: в режиме прицеливание , где в нашем примере частота следования Fc = 1200 Гц, длительность = 0,5 мкс; в режиме поиск Fc = = 600 Гц, Тц = 1 мкс и в режиме маяк Fc = 300 Гц, t = 2 мкс. Антенна панорамной РЛС - рефлекторная с цилиндрическим зеркалом специального профиля и линейным облучателем сегментно-пара-болического типа [8, т. 2, с. 242]. Для точного измерения азимута горизонтальный размер рефлектора выбирают максимально возможным. Антенна даже несколько выступает за пределы фюзеляжа, и тогда при X = 2-4 см ширина диаграммы направленности в горизонтальной плоскости 2фо,5 1-3° [13]. Профиль рефлектора устанавливается исходя из условия, что мощность сигнала на входе приемника Рс не должна зависеть от наклонной дальности Д, а только соответствовать размерам и отражающим свойствам объекта. Для этого согласно формуле,(4.7) отношение Од/Д* должно быть постоянной величиной, но так как Д = Я sec Р, то КНД антенны Da должен быть пропорциональным квадрату косеканса угла наклона луча: DA-secp = cosec-(90°-р). (11.22) § 85. Применение пассивной радиолокации в авиации Относительная простота и надежность пассивных радиолокаторов - качества, весьма важные для авиации. Ниже приводятся два примера применения радиотеплолокационных станций (РТЛС) в авиации. Снятие радиометрической карты местности с самолета. Земная и водная поверхности, а также находящиеся на них объекты создают различное по интенсивности тепловое излучение. Это используется для получения яркостного изображения панорамы местности на экране ЭЛТ. Панорама снимается с летательного аппарата РТЛС, совершающей обзор земной поверхности двумя иглообразными диаграммами направленности приемной антенны. Диаграммы качаются вокруг горизонтальной оси в некотором секторе углов (рис. 11.23, а). В индикаторе происходит развертка по горизонтали синхронно с качанием ДН и по вертикали - пропорционально скорости ЛА. Качество радиолокационного изображения получается высоким. В этом можно убедиться, сравнив радиометрическую карту, полученную на миллиметровых волнах (рис. 11.23, б), с географической картой той же местности (рис. 11.23, в). 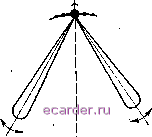 - /У  Рис. 11.23. Сканирование луча антенны РТЛС (а), радиометрическая карта местности, получаемая с помощью РТЛС, (б) и географическая карта той же местно-. сти (в). Самолетные РТЛС для пассивного обнаружения целей используются для защиты задней полусферы бомбардировщика от истребителей противника. В состав станции входят детекторный приемник с видеоусилителем, реагирующий на излучение РЛС истребителя, интегратор и пороговое устройство. Как известно, одноканальный пассивный радиолокатор не позволяет измерять дальность и скорость цели. Поэтому для управления стрельбой с бснйбардировщика требуется более сложный (двухканальный) пассивный радиолокатор. Функциональная схема американской станции такого назначения Padar показана на рис. 11.24. Один канал радиолокатора с широкополосным детекторным приемником предназначен для приема прямого сигнала, другой канал с широкополосным супергетеродином - для приема отраженных от Земли сигналов. Угол места Р истребителя относительно бомбардировщика определяется по методу конического сканирования в канале прямого сигнала. Огибающая радиоимпульсов выделяется амплитудным детектором; напряжение огибающей усиливается в видеоусилителе и поступает вместе с опорным сигналом генератора сканирования в фазовый детектор. В результате получается постоянное напряжение, пропорциональное углу места цели р. Одновременно измеряется время запаздывания At отраженного сигнала и-о относительно прямого и. Вместе с данными об угле 1шп-а р и времени At в вычислительное устройство вводятся данные от радиовысотомера о высоте полета Я. Затем вычисляется расстояние между бомбардировщиком и истребителем 2с Д<-4 ,sinP /(атл прямого сигнала Механизм снанирования Генератор опорных сигналов Фазовый йетентор Прямой сигнал Опорный сигнал АмппитрЛ/ый йетентор Высотомер Вьмаспитель-нов 1СЛ1рОйСП)вО Видеоусилитель Измеритель времени запаздывания
Видеоусилитель  Отраженный сигнал Рнс. 11.24. Функциональная схема самолетной РЛС типа Padar . Если бортовая РЛС истребителя излучает ЧМ колебания, то дальность Д определяют по разности частот прямой и отраженной от земли волн, а также измеряют скорость истребителя относительно бомбардировщика Уд по допплеровскому сдвигу частоты. Точность измерений получается не ниже чем при активной радиолокации. В частности, ошибка определения дальности равна 20-30 м IOl. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 [53] 54 55 |
||||||||||||