
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 [7] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 повторяются с частотой следования F. Они возводятся в квадрат и складываются: Как видно, такое, решение исключает влияние возможного неравенства частот опорного гетеродина оп и сигнала ю. Нелинейный усилитель, имеюш;ий соответствующую амплитудную характеристику, извлекает квадратный корень из напряжения /(дС/хт. в результате чего амплитуда импульсов на входе видеоинтегратора Кд?/вхт прямо пропорциональна амплитуде t/вхт сигналов, снятых с фильтра. Фильтр, оптималь- нбш для оданочиого импульса
детектор- BosSedsffue S квадрат
/fmespamcpt/ Рис. 2,15. Фуикциоиальиая схема когерентного приема сигналов с использованием квадратурных каналов. Здесь нелинейные операции, например возведение в квадрат, уменьшают отношение сигнал/шум так же, как-в детекторе огибающей. Пример 2.2. Определить У, т. е. отношение сигнал/шум по напряжению, на выходе синхронного фазового детектора и детектора огибающей, если на входе их действуют сильный сигнал с отношением ]/<7о = 10 и слабый сигнал с 1/= 0,1. Синхронный фазовый детектор не вносит потерь и, следовательно, на выходе его имеем соответственно Л= /= Ю и /= / = 0,1. Амплитудный детектор, являясь линейным при = уменьшает это отношениеа счет внефазной составляющей шума в два раза: )/ 9 = 0,5 /9(, = 5. При У9о = 0.1 детектор огибающей квадратичный и поэтому = ()9о) = 0.01, т. е. энергетические потери в детекторе весьма значительны. § 12. Оптимальная фильтрация некогерентных импульсов Строго закономерная связь между фазами сигналов, необходимая для когерентного приема, достигается, как правило, применением сложных устройств. Поэтому более широко используется менее эффективный, но легче осуществляемый некогерентный прием. Устройство обработки некогерентных сигналов (рис. 2.16, а) начинается 46 оди/аутх-импу/ПсоЭ Летенто/т югидающеа. еадерши Линия Сумматор /ТсрогоЗов устройства Л Л А А Л Л 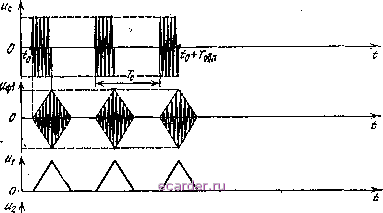 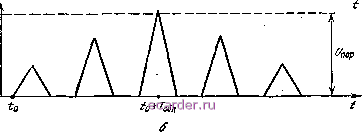 Рис, 2.16. Функциональная схема оптимального фильтра пачки иекогерентных импульсов (а) и временные диаграммы к ней (б). с оптимального фильтра для одиночных импульсов, затем следует детектор огибающей и завершается обработка видеоинтегратором, который состоит из линии задержки (с отводами через период То) и сумматора. Такая последовательность обработки объясняется тем, что отсутствие закономерной связи между начальными фазами сигналов исключает возможность додетекторного интегрирования и применения син-хронногр фазового детектора. Каждый импульс промежуточной частоты Ывх подвергается оптимальной фильтрации (ИфО, затем в процессе детектирования огибающей фазы импульсов усредняются и полученные видеоимпульсы щ синхронно интегрируются до напряже-жения 2 (рис. 2.16, а, б). Синхронность достигается задержкой видеоимпульсов Ыг, з. относительно щ на время, кратное периоду следования Тс (на временных диаграммах число импульсов в пачке = 3). Максимальный из импульсов вблизи своего пикового значения, т. е. примерно в конце облучения цели (= + Тобл. ). проходит испытание на порог. Синхронное интегрирование видеоимпульсов происходит в аналоговых и цифровых запоминающих устройствах. Аналоговые запоминающие устройства, в свою очередь, подразделяются на динамические (ультразвуковые линии задержки, линии задержки с рециркуляцией) и статические (экран индикатора РЛС, магнитный барабан, потен-циалоскоп). Динамическое запоминание связано с динамикой прохождения волны тока и напряжения, а статическое запоминание - с длительным накоплением заряда или намагничиванием. Интегрирование можно также осуществить запоминанием сигналов водном из перечисленных устройств и последующим суммированием сигналов в интегрирующем фильтре. Цифровые интеграторы отличаются от аналоговых дискретным действием, в них используется цифровая техника. Эффективность, оптимальной обработки некогерентных сигналов снижается за счёт потерь при детектировании и интегрировании. Потери детектирования могут оказаться значительными вследствие того, что оптимальной фильтрации одиночного импульса (а не всей пачки) может быть недостаточно дляполучения сильного сигнала на входе детектора. Эти потери сказываются и на результатах после-детекторного интегрирования, так как каждый импульс пачки поступает в интегратор ослабленным. К тому же ряд интеграторов по мере накопления импульсов теряет линейные свойства и насыщается. Ориентировочно последетекторное интегрирован ие пачки из Л импульсов увеличивает отношение сигнал/шум в -j/Aj раз, а не в Л?, как . при когерентном интегрировании. § 13. Корреляционная обработка сигналов 13.1. Коррелятор (рис. 2.17) предназначен для оптимальной обработки сигналов на основе электронного вычисления интеграла вза-. имной корреляции двух напряжений: входного Ывх (0. которое является смесью сигнала и (/) и шума Ыщ ({), и опорного оп (0> которое 48 повторяет сигнал с запаздыванием на некоторое время т: вх (О = о (О + ш (0; (2.27) од(0 = o(-t). - (2.28) Коррелятор состоит из перемножителя входного и опорного напряжений и интегратора, суммирующего результаты перемножения за время t от-оо до -joo. Выходное напряжение интегратора uz является результатом интегрирования, т. е. функцией корреляции R (т). Допустим, что напряжения шумов нет: Ыщ (О = О- Тогда Ывх (О = <= Ыо (О и оп (О = Мс (/ - т) = Ывх (t - T:), т. е. опорный сигнал
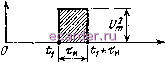
Рис. 2.17. Упрощенная функциональная схема корреляционной обработки сигналов. является аналогом всего входного напряжения. Это частный случай взаимной корреляции, который называется автокорреляцией. Раскроем содержание корреляционного интеграла R (т) и тем самым самого коррелятора. Для этого обратимся к простому примеру автокорреляции прямоугольных видеоимпульсов амплитудой {/ и длительностью Ти (рис. 2.18). Если входной импульс Ыо (О начинается в момент времени U (рис. 2.18,13), а опорный Ыоп (О запаздывает на Tj, то до момента = + Tj (когда Ыоп = 0) и после t = U -f Ти (когда и = 0) их произведение равно нулю. Только в течение времени Ти - Ti, когда каждое напряжение равно Um, их произведение и ({) Ыоп (О = fJm-Площадь заштрихованного прямоугольника, которая выражает значение корреляционного интеграла для временного сдвига т = Xj, равна R (tj) = Ul, (Ти -Tj). На графике корреляционной функции R (т) этот результат представлен вертикальной линией высотой R (xj), проведенной из точки с координатой т = Xj на оси абсцисс. Если X = О, т. е. входной и опорный импульсы по всей их длительности Хи совпадают во времени (рис. 2.12, б), то произведение этих сигналов, представленное площадью заштрихованного прямоугольника, равно энергии импульса: R (0) = UXa = Э. При временном сдвиге опорного сигнала в сторону опережения (х < 0) интеграл R (х) уменьшается по сравнению с интегралом R (0), соответствующим х = 0. Это иллюстрируется рис. 2.18, е, где т = = -Х2 и пропорциональное заштрихованной площади выходное напряжение коррелятора R (Xg) = Um (ти - Тг) Совершив аналогичные операции для всевозможных временных сдвигов (от - оо до + оо), получим автокорреляционную функцию Я (т) прямоугольных видеоимпульсов (рис. 2.19). В данном случае, очевидно, область интегрирования можно ограничить значениями Ue(tlUon[tl 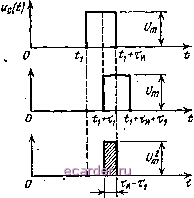 UiltjUgnlt).
 R(t2) Рис. 2.18. К вычислению авто-t корреляционной функции прямоугольного видеоимпульса. ±Ти. Полученная функция R (т) имеет форму треугольника с пиковым значением, равным энергии входного сигнала: R (0) = Э. Обратимся теперь к пачке из трех прямоугольных видеоимпульсов длительностью Тд и периодом следования Го (рис. 2.20, а). При сдви- ге опорного сигнала оп (О относительно входного сигнала (О на время т = -2То (рис. 2.20, б) один опорный импульс (заштрихованный) полностью совпадает с входным и поэтому R (т) = Э. Если т = -Тс, то полностью совпадают два импульса и (т) = 2Э, а при, т = О - три импульса, что соответствует R (т) = ЗЭ и т. д. Ясно, что вблизи этих значений т корреляционная функция имеет вид равнобедренного треугольника с основанием 2Тд. Сопоставляя рис. 2.20, д и 2.16, б, убеждаемся в полном совпадении выходных напряжений оптимального фильтра и коррелятора. Это не случайно: оптимальная фильтрация и корреляционная обработка сводятся по существу к внутрипериодному интегрированию одиночного импульса и, кроме того, к межпериодному интегрированию в случае пачки импульсов. 13.2. Процессы, происходящие в корреляционном приемнике. Ос-] новой для построения корреляционного приемника обычно является! функция взаимной корреляции, а не автокорреляции, так как в авто- 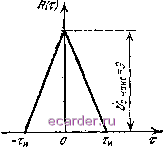 Рис. 2.19. Автокорреляционная: функция прямоугольного видео- импульса.
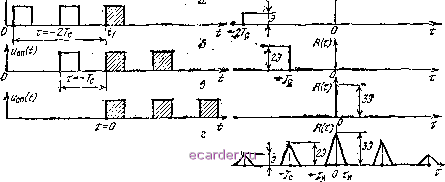 Рис. 2.20. К определению автокорреляционной функции пачкн прямоугольных видеоимпульсов. - JiTg корреляционном приемнике опорное напряжение должно быть аналогом всего входного напряжения, включая его шумовую составляющую, и это затрудняет выявление слабых сигналов на фоне шумов. Принципы взаимно-корреляционного приема нашли отражение в некоторых ранее рассмотренных устройствах. Например, синхронный фазовый детектор содержит все элементы взаимной корреляции: опорный гетеродин, воспроизводящий ожидаемый сигнал без помех; балансный церемножитель напряжений Ывх (О и оп (О - это нели- 1 2 3 4 5 6 [7] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||