
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 [9] 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 Пример 2.3. Определить чувствительность приемника импульсной некогерентной РЛС с автоматизированным выходным устройством. Исходные данные: вероятности правильного обнаружения Япо = 0.9 и ложной тревоги Рлт = Ю ; число импульсов в пачке Ni = 20; импульсы прямоугольной формы длительностью Ти = 1 мкс; коэффициент шума приемника Ш = 10. 1. Определить, какое отношение сигнал/шум по энергии требуется на входе приемника, если при прочих равных условиях приемный канал РЛС не вносил бы потерь. Так как наиболее реальный случай приёма относится к сигналам, имеющим случайные амплитуду и фазу, то воспользуемся рабочими характеристиками приемника, показанными на рис. 2.23. Из этих характеристик находим, что для Рпо = 0,9 и Рлт = lO искомое отношение 9о2 = 200. 2. Выбрать схему УОС. Учитывая, что принимаются пачки некогерентных импульсов, выбираем УОС, состоящее из квазиоптимального фильтра, согласованного по полосе пропускания с одиночным импульсом, амплитудного детектора и видеоинтегратора. 3. Определить общий коэффициент потерь. а) Линейная часть приемника, как обычно, имеет коэффициент потерь aj = 1. Для самого фильтра, согласно его исходным данным, 2=1,2. б) Коэффициент потерь детектирования при os = 200 и Nt ~ 20 равен аз = 1,6 (см. рис. 2.24). в) Потерям, обусловленным насыщением видеоинтегратора, соответствует 4 = 1,2, поскольку Ni = 20. г) Коэффициент потерь, связанный с формой диаграммы направленности антенны, ад = 1,5. д) Потерям в фидерах соответствует = 1,6. Итак, общий коэффициент потерь а == aiagasaagae = 1 1,2 1,6 1,2 1,5 1,6 = 5,53. 4. Определить коэффициент различимости при идеальном приемнике 1 Vos 1-200 2-20 = 5. 5. Определить реальный коэффициент различимости т == т а = = 5 5,53 = 27,65. 6. Определить мощность шумов, приведенную к входу приемника. Из формулы (2.20) имеем ш вх = .1,38 10-2 290 Ю/Ю- = 4 . 10- Вт. 7. Чувствительность приемника согласно формуле ..,(2.21) равна Рс мин = трРшвх = 27,65 . 4 10- = 1,12 10-* Вт. Глава 3. МЕТОДЫ ИЗМЕРЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛЕЙ § 15. Общие сведения о радиолокационных измерителях 15.1. Назначение и классификация радтлокациоиных изме№ телей. Радиолокационная информация становится доступной для ее получателя лишь после того, как параметры обнаруженных сигналов, в которых содержится эта информация, преобразуются в соответствующие величины (аналоги). Например, оператор РЛС судит о координатах и скорости цели по отметкам на электронно-лучевых индикаторах или по показаниям стрелочных приборов; вычислительная машина непрерывного действия реагирует на постоянные напряжения, цифровая вычислительная машина - на цифровой код и т. д. Радиолокационные измерители предназначены для того, чтобы преобразовывать параметры обнаруженных сигналов именно в такие аналоги, которые позволяют выявить нужную радиолокационную информацию, зашифрованную в параметрах принятых сигналов. Основные требования к радиолокационным измерителям: высокая точность измерений; темп измерений должен соответствовать количеству одновременно наблюдаемых целей и их скоростям; принятый метод измерений должен удовлетворять требуемой разрешающей способности РЛС; метод измерений должен соответствовать применяемой системе обнаружения. Последнее требование облегчается тем, что оптимальная фильтрация и корреляционная обработка сигналов способствуют не только обнаружению слабых сигналов, но и повышению точности измерений. Все же некоторые различия имеются: чтобы совместить заданные вероятности правильного обнаружения и ложной тревоги, выбирают промежуточный порог обнаружения, тогда как наибольшая точность получается при фиксации пика оптимально обработанного сигнала. Радиолокационные измерители классифицируются по следующим признакам: а) Непрерывнее измерение текущих координат и скоростей целей, называемое сопровождением (слежением), может быть ручным (полуавтоматическим) или автоматическим. Измерители, применяемые для этого, классифицируются соответственно как неследяшие или следящие. б) По числу каналов измерители разделяются на одноканальные и многоканальные. в) По измеряемой координате или параметру движения цели различают измерители дальности, азимута, угла места (высоты), радиальной и угловой скорости. г) По методу измерения - это амплитудный, частотный, фазовый, допплеровский и другие методы, в зависимости от того, какой параметр сигнала служит основой для измерений. 15.2. Потенциальная разрешающая способность РЛС. Среди ряда факторов, влияющих на характеристики РЛС, отношение сиг-га нал7шум и структура сигнала играют особую роль, так как они определяют потенциальные (предельные) возможности измерителя. . Остановимся на потенциальной разрешающей способности РЛС. Для разрешения двух целей их сигналы должны достаточно различаться хотя бы по одному из параметров: времени запаздывания (дальностям целей), направлению приема (угловым координатам) или допплеровскому сдвигу частоты (скоростям целей). Обозначим этот параметр через 7. Достаточным считается такой сдвиг по разрешающему параметру <у. когда сигналы целей /, 2 перекрываются на уровне, не превышающем 0,5 от максимума 1/ (рис. 3.1, а). 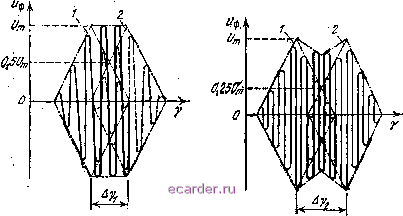 а :. б- Рис. 3.1. Интерференция двух радиоимпульсов. Действительно, если при этом сигналы совпадают по фазе, то они сливаются на интервале Дуь но достаточно взаимному сдвигу сигналов несколько увеличиться (Дуг > А71, Рис. 3.1,6), чтобы огибающая результирующего напряжения, которая изображена штрихпунктир-ной линией, стала двугорбой, и тогда сигналы различаются. Влияние ширины сигнала по хЬраметру 7 иллюстрируется рис. 3.2: при уменьшении ширины (рис. 3.2, а и б) разрешающая способность улучшается от Ду до Ду < Ду. Отсюда следует вывод: для хорошего разрешения по дальности (у - Тц) длительность сигнала Ти должна быть как можно меньше, а ширина спектра соответственно больше; для улучшения разрешения по скорости, которое производится по допплеровскому сдвигу частоты (у = Рдоа), спектр должен быть узким, а сигнал соответственно большой длительности {лучше всего непрерывным); разрешение по угловой координате {у = 2фо,5) тем лучше, чем меньше ширина 2фо,5 соответствующей диаграммы направленности антенны. * Влияние шумов на разрешение целей иллюстрируется рис. 3.3: хорошо различимые сигналы 1 н 2, смешиваясь с шумовым выбросом 3, образуют выходное напряжение приемника 4, в котором полезные сигналы уже не различаются. Значит, не только обнаружение, но и разрешение сигналов тем эффективнее, чем больше отношение сиг-нал1шум. Если это отношение достаточно велико, то потенциальная разрешающая способность РЛС по дальности ДДминп. радиальной скорости ДУмивп и угловой координате Афмин п связана с длительностью сигнала Ти, эффективной шириной его спектра А/в и шириной диаграммы направленности 2фо,5 (на уровне 0,5) зависимостями: АДмин = ст /2~с/2Д/ (3.1) ДУмив п = 3,8с/(от ~ 3,8сД/,/©. (3.2) (3.3) 0,5U
 Рис. 3.2- Разрешение двух сигналов большой (а) и малой (б) протяженности по параметру у. Рис. 3.3. Взаимодействие сигналов /, 2 в шумового выброса 3 иа выходе приемника. где С = 3 10 м/с - скорость света; (о - круговая несущая частота радиосигнала. Эти формулы, из которых (3.1) и (3.2) относятся к прямоугольным радиоимпульсам, полностью согласуются со сказанным о влиянии параметров Ти, А/а и 2фо,5 на разрешение сигналов. Вопрос о потенциальной точности измерений будет рассматриваться при изучении методов радиолокационных измерений. § 16. Импульсный метод радиодальнометрии с излучением простых радиоимпульсов Это один из амплитудных методов радиолокационных измерений; для его реализации незатухающие колебания несущей частоты подвергаются в передатчике амплитудно-импульсной модуляции. 16.1. Сущность метода. Рассмотрим импульсный метод на примере радиолокационного дальномера, в котором обработка сигналов неоптимальная и измеритель дальности неследящий в виде индикатора с электронно-лучевой трубкой (ЭЛТ). Фильтры УПЧ прием- ника квазиоптимальные они согласованы с одиночными импульсами только по полосе пропускания, а последетекторная обработка сигналов сводится к некогерентному накоплению в ЭЛТ. Функциональная схема дальномера представлена на рнс. 3.4, а временные диаграммы - на рис. 3.5. Синхронизатор РЛС создает импульсЬ! щ со строго стабильным периодом следования Т. Этими импульсами одновременно запускаются передатчик и генератор развертки, напряжение которого М5 подается на горизонтально отклоняющие пластины ЭЛТ. Радиоимпульсы передатчика Мг имеют длительность т и ту же частоту следования Fg = 1/Тд, что и синхронизирующие импульсы щ. Антенный переключатель направляет зонди- ЛереЗа/тик 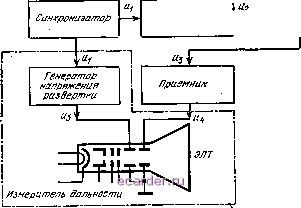
Рис. 3.4. Функциональная схема импульсного радиолокационного дальномера. рующие импульсы в антенну и закрывает вход приемника на время передачи. После отражения от цели образуются радиолокационные импульсы Нз, которые принимаются той же антенной. Вследствие несовершенства антенного переключателя на вход приемника проникает малая доля высркочастотной энергии передатчика, которая служит опорным сигналом для отсчета дальности. Все эти радиоимпульсы усиливаются и детектируются в приемнике, в результате чего получаются видеоимпульсы и. Приложенные к вертикально отклоняющим пластинам ЭЛТ, они вызывают вертикальное отклонение светового пятна на экране трубки. Место отклонения зависит от напряжения развертки щ в данный момент времени t. Напряжение пилообразное, оно нарастает с постоянной скоростью Wp во время прямого хода развертки и быстро уменьшается до исходной величины во время обратного хода развертки То; далее следует интервал покоя Тц вплоть до начала очередного цикла развертки. В связи с запаздыванием на время отраженного сигнала отметка его смещена от начала развертки на расстояние = рд = р2Д/с, (3.4) что соответствует масштабу \ tn=llJX = 2wp/c. (3.5)
 Зондирунзщие импульсь/ Отражеш/е импульсы 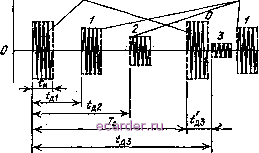 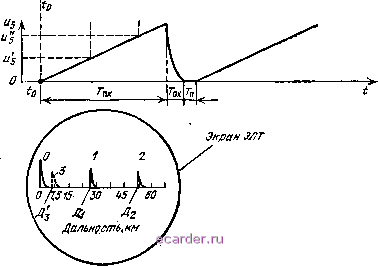 Рис. 3.5. Временные диаграммы напряжений в импульсном радиолокационном дальномере, 1 2 3 4 5 6 7 8 [9] 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 |
|||||||||||||||||||||||||||||||||||