
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 [24] 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 ВИЙ, то она находится в состоянии 5 . Если она им не удовлетворяет, то находится в состоянии Si, где подвергается ремонту. Данная система осуществляет прямые и обратные переходы из So в Si, как показано на рис. 2.24 схематически в форме направленного графа. В момент времени =0 система находится в состоянии So, что на рис. 2.24 условно представлено пунктирным прямоугольником. Теперь ответим на ряд типовых вопросов анализа надежности.  Рис. 2.24. Граф, иллюстрирующий прямые и обратные переходы из состояний So и iSi. 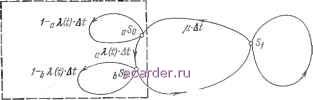 Рис. 2.25. Граф, полученный на основании графа, представленного на рис. 2.22: все вероятности переходов за время Ы от времени t не завысят С какой вероятностью Р/ система откажет в первые 0 лет работы? Ответ ясен: эта вероятность составляет 1-R{to). Обращаясь к табл. 2.2, на основании рис. 2.25 и рис. 2.10 имеем Pf 1 - ехр[ - 1 ] = 1 - (1 + ехр ( - д. о . / Для 0=3 г. Pf составляет около 0,8. Поскольку система переходит из одного состояния в другое мгновенно, для вероятностей ее пребывания в состояниях So и Si справедливо соотношение Po(So, /)+Pi(Si, -0=1. Вычислим преобразование Лапласа для P\{Si, i), ; т. е. Р\{р)- Исходя из вида функции Xit) (2.91), состоя-!. ние So можно рассматривать как совокупность двух со- стояний aSo и /,5о, последовательно сменяющих одно другое. Поэтому переход из So в Si с интенсивностью отказов X{i) эквивалентен переходу из aSo в f,So с интенсивностью отказов Д(/)=>. н из состояния bSo в Si с интенсивностью i%{t)=%. Однако теперь важно, что a%{i) и b?i(/) от времени не зависят. Используя теорию графов, эту идею можно схематически представить, как показано на рис. 2.25. Графы на рис. 2.24 и 2.25 эквивалентны в смысле равенства тех вероятностей, с которыми система может попасть в состояние или покинуть состояние, условно показанное пунктирным прямоуголь-, ником, за время At. Пусть аР. [aS i) ь= аР, {t), ьР, {bS t) = ьР, Щ. Тогда на основании графа переходов, показанного на рис. 2.25, можно записать такие дифференциальные уравнения: daPAt)ldt=-vP{t)-alaP,t\ dbP, {t)ldt = аХР, (t) - bUP, (/); dP,{t)ldt==bibPAt)-\PAi)- Заметим, что в момент времени =0 а/о(0)=1 и ьР{)~ =:Pi(0)=0. С учетом этих условий последние уравнения можно представить в терминах преобразований Лапласа: P + at О -10, - a? /? -Ь fc о о -fcX p + yi-. Отсюда искомое преобразование Лапласа для Pi{t) можно найти как . 1 р[р + р\ {ah -Ь Ьк + Jo + м- {аК -\-ьК) -f am При использовании обратного преобразования получаем Pi{t). Найдем предельное значение для Ро(0> когда t неограниченно возрастает, т. е. Pq{oo). Вычислим сначала Л(оо), а затем определим Рс{оо) как 1-Pi{oo). Вероятность Pi(oo) сразу получается как рР\{р) при
р-0. Обращаясь к (2.93), получаем Л(с )==г-тттт-п- * (2-94) Последний результат ясен, поскольку ремонт в среднем продолжается 1/р,=1/100 г., а система в среднем исправно работает (1/Д--1/ьЛ)=2 г. до отказа. Величина [1/аЯ+1/б:>ь+1/р,] = (2 А-Ы/pi), следовательно, составляет в среднем то время, которое система проводит в некотором цикле последовательной смены состояний So и Si. Согласно (2.94) Pi(oo) есть предельная вероятность пребывания системы в ремонте при t->-оо. Если-система находится в состоянии So, а не в Si, то она работоспособна. Следовательно, Ро(оо) является коэффициентом готовности системы: . РДсо)=:(1/аЯ+1/а)/(1/Д+1/Я--1/}.). 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 [24] 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 |